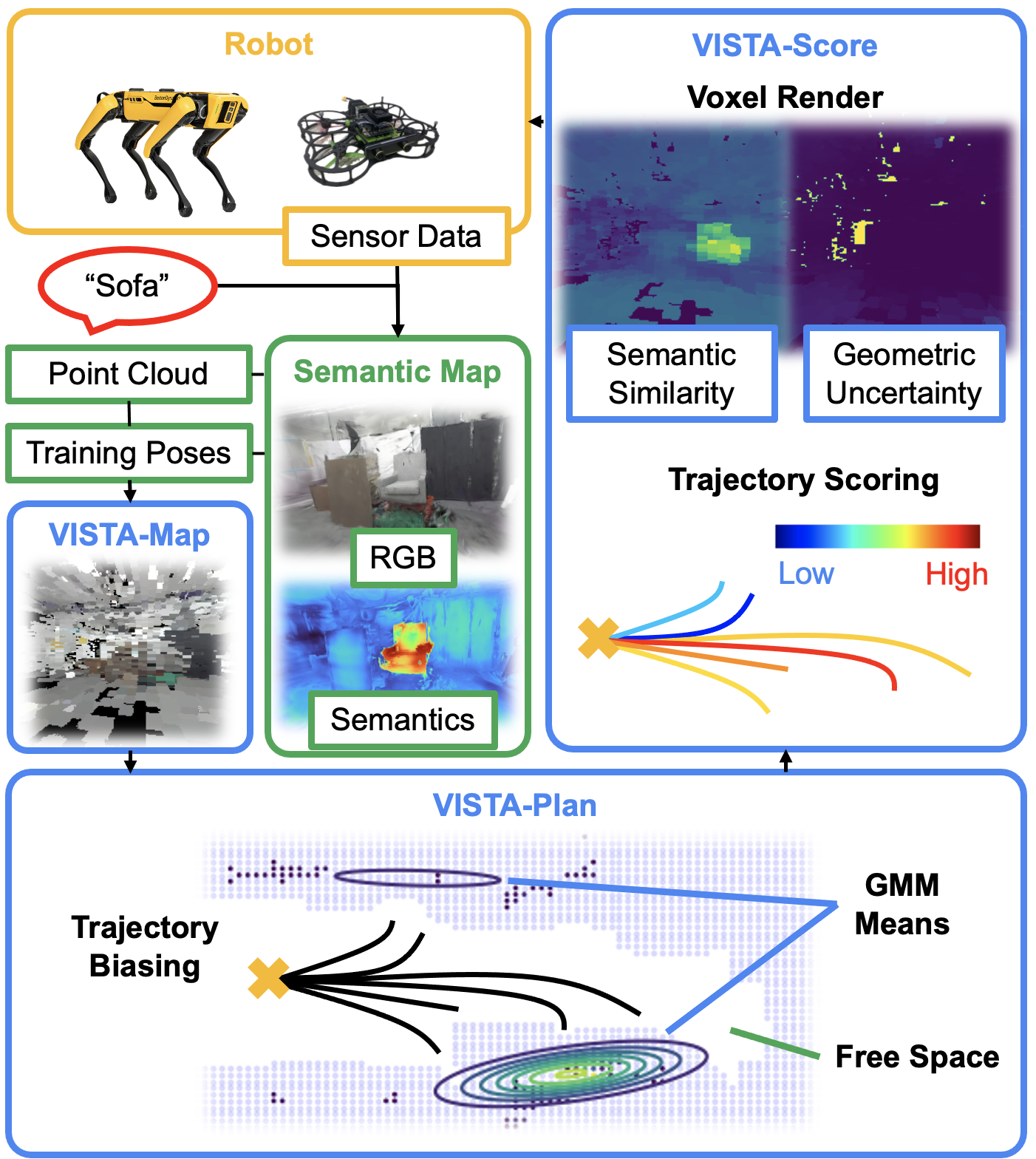
VISTA: Open-Vocabulary, Task-Relevant Robot Exploration With Online Semantic Gaussian Splatting
VISTA simultaneously performs semantic and geometric information gain next-best-view gathering in order to efficiently create 3D reconstructions that are salient to a language-based instruction.
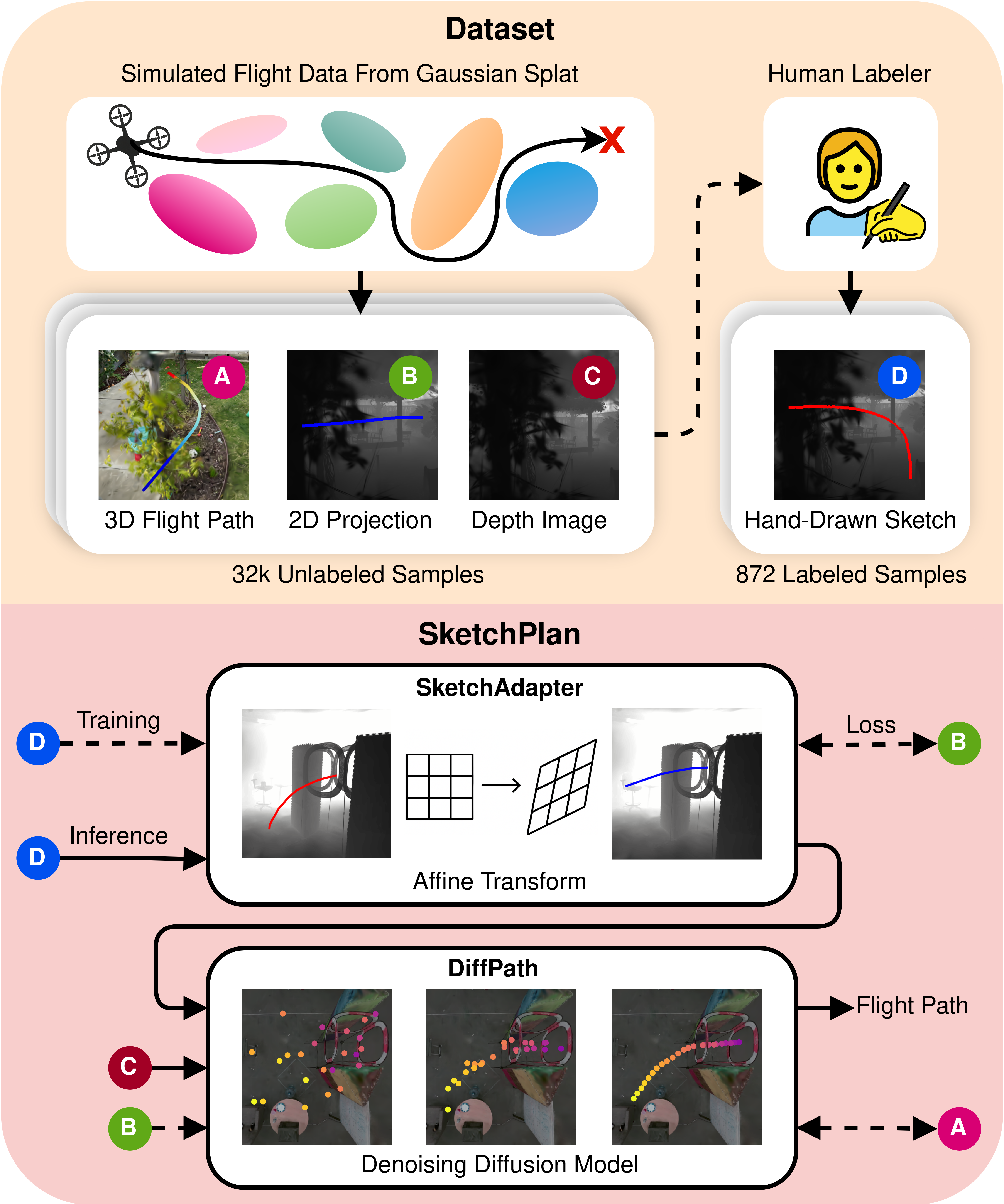
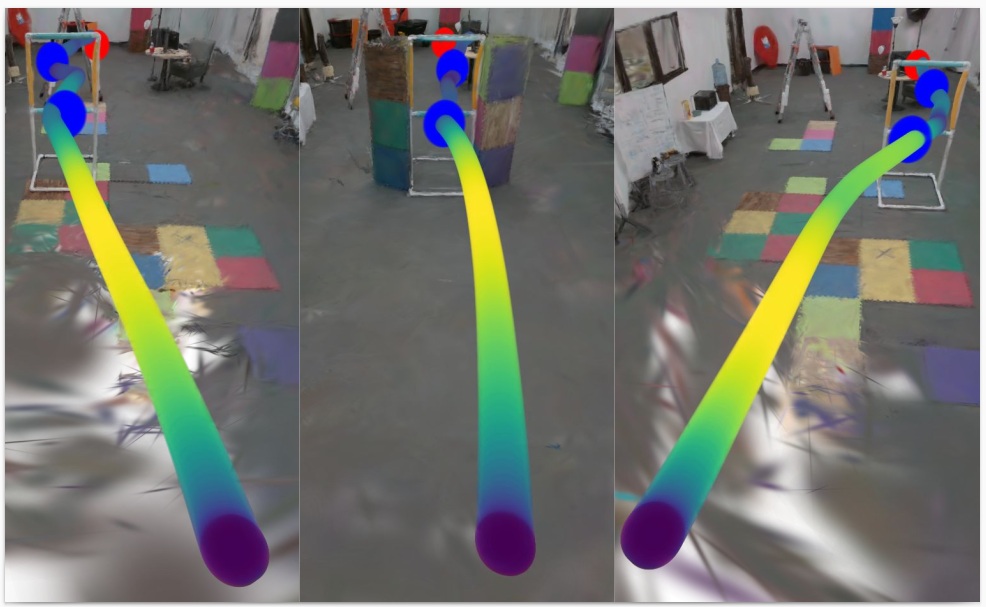
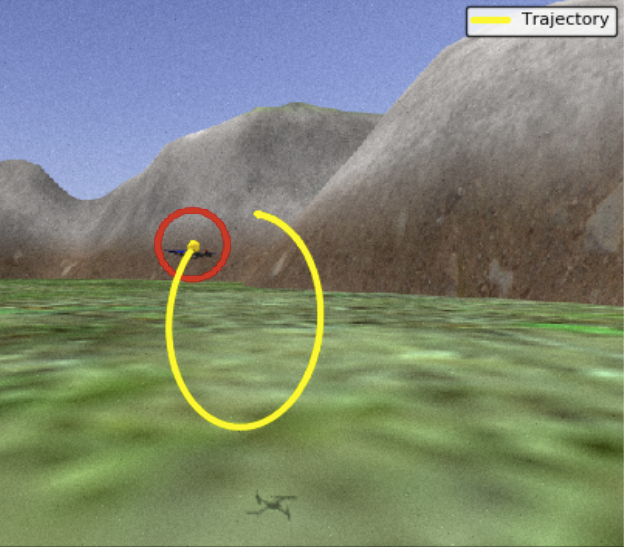
SketchPlan: Diffusion Based Drone Planning From Human Sketches
We propose SketchPlan, a diffusion-based planner that interprets 2D hand-drawn sketches over depth images to generate 3D flight paths for drone navigation.
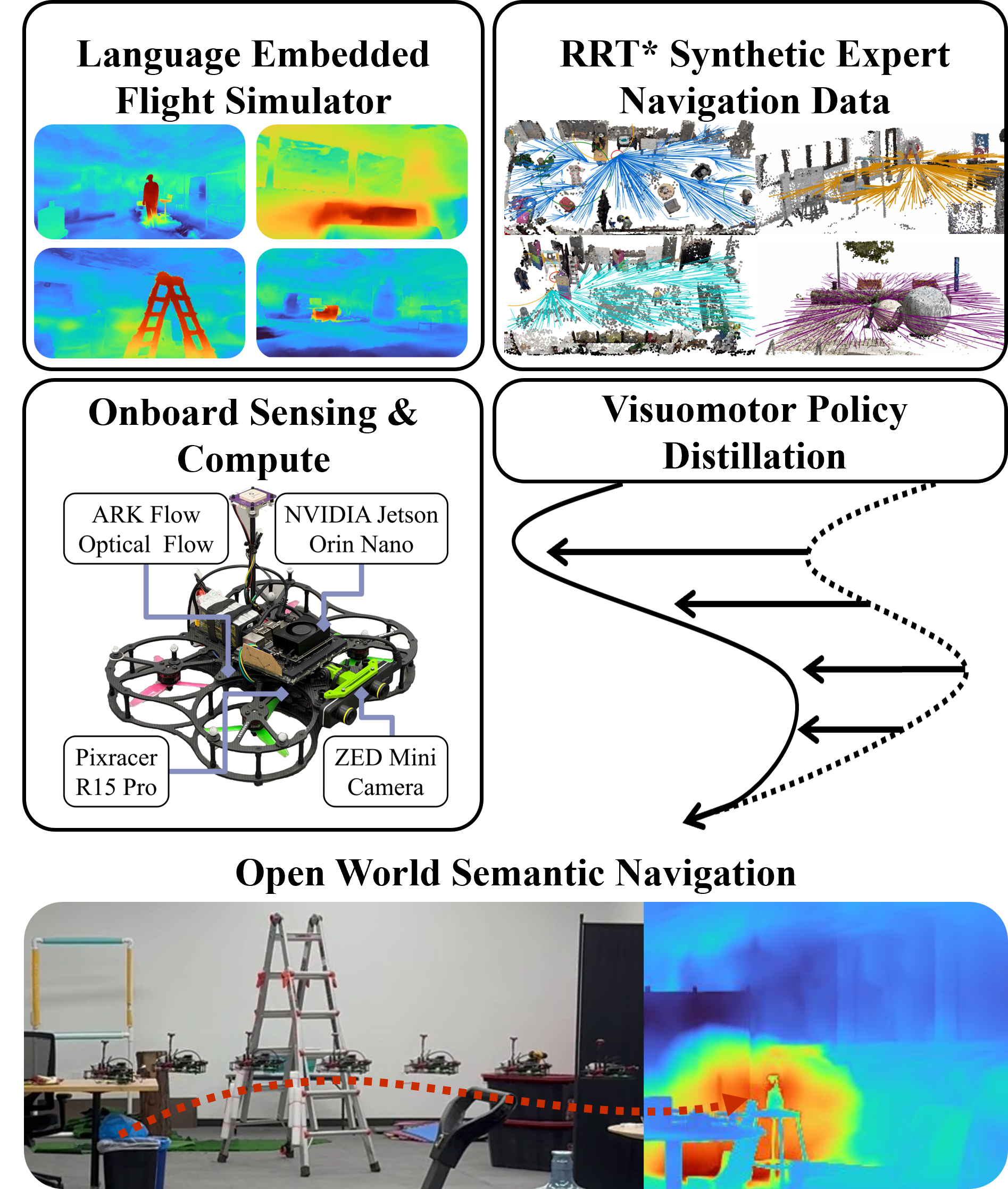
SINGER: An Onboard Generalist Vision-Language Navigation Policy for Drones
SINGER is a recipe for generalist language guided visuomotor navigation for drones.

SARM: Stage-Aware Reward Modeling for Long Horizon Robot Manipulation
SARM is a stage-aware, video-based reward modeling framework that enables scalable and robust imitation learning for long-horizon tasks by deriving progress signals from natural language annotations, dramatically improving policy performance over standard behavior cloning.
Rethinking the Primitives: Next Generation LLM Architecture
A layer-by-layer redesign of the Transformer stack. Starting from the outermost layer — how position is encoded — and working inward through attention mechanisms, linear hybrid architectures, sparse expert routing, and finally normalization. Each work finds the hidden mathematical structure of one component and replaces engineering convention with a principled derivation.
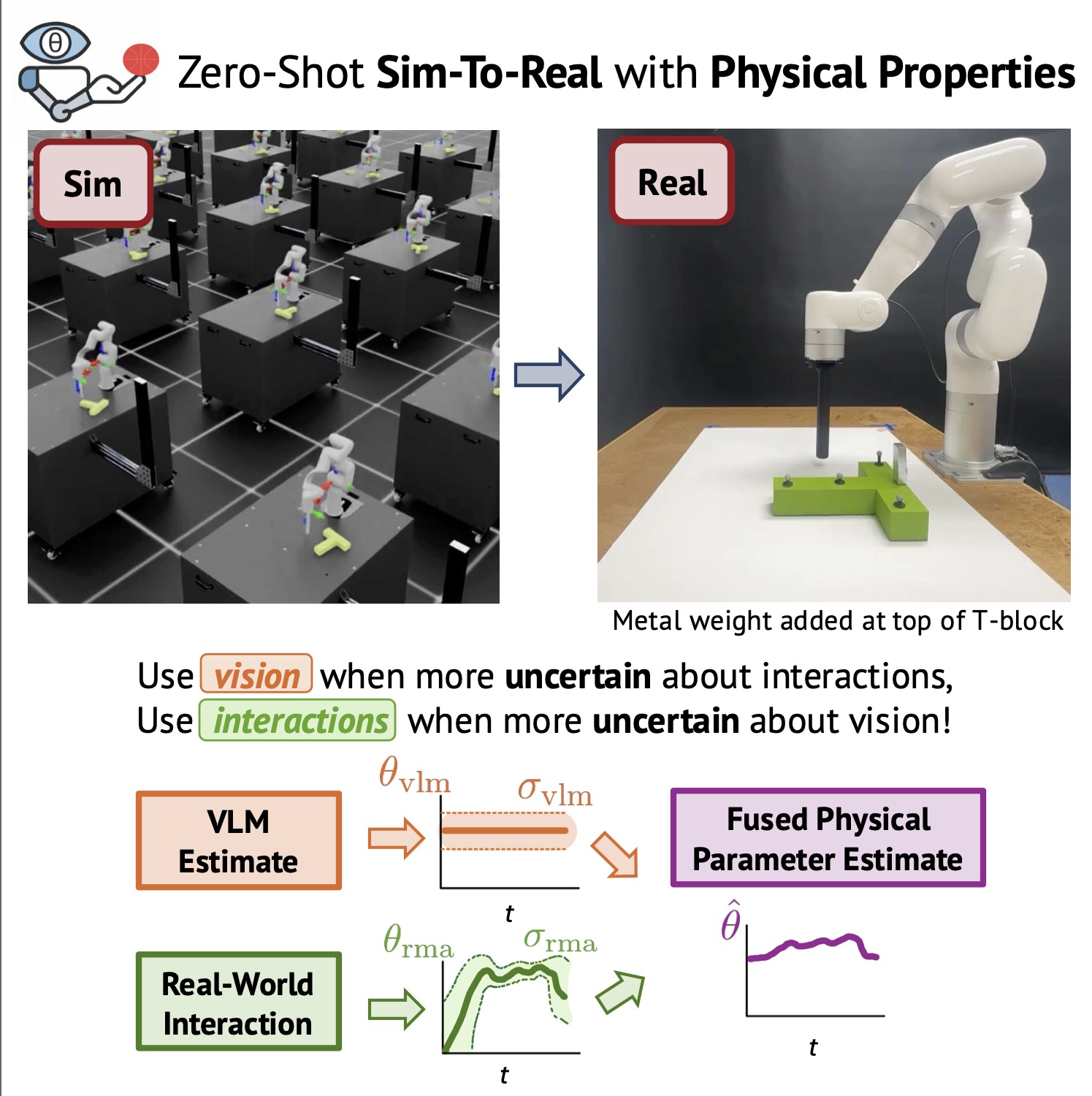
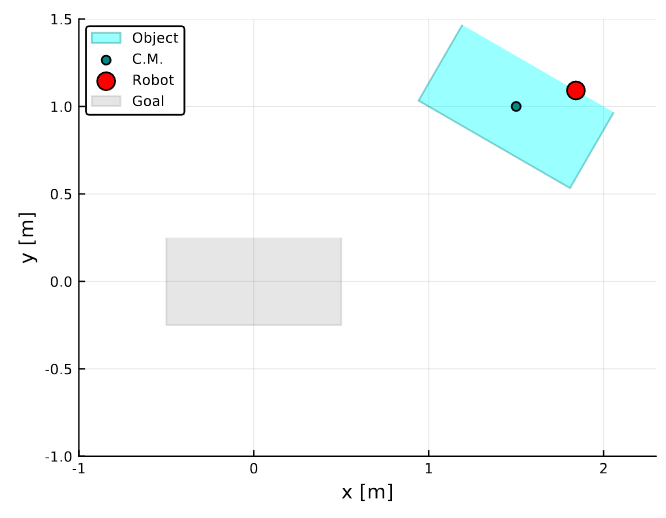
Phys2Real: Fusing VLM Priors with Interactive Online Adaptation for Uncertainty-Aware Sim-to-Real Manipulation
Fuses VLM physical priors with interactive online adaptation to enable zero-shot manipulation of objects with unknown physical properties.
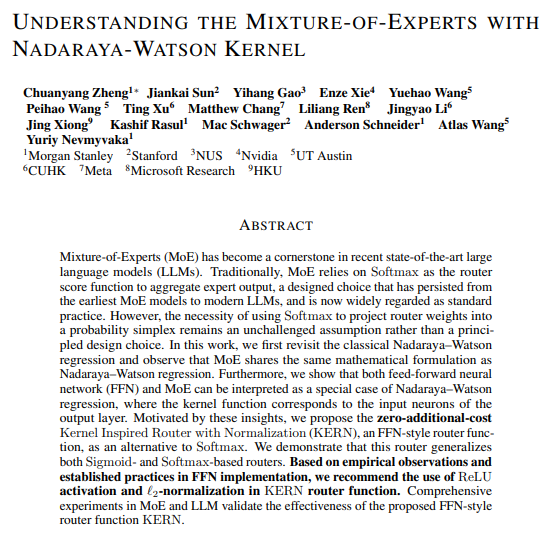
Understanding the Mixture-of-Experts with Nadaraya-Watson Kernel
We propose KERN (Kernel Inspired Router with Normalization), a zero-additional-cost FFN-style router for MoE models. By connecting MoE to Nadaraya-Watson regression, we show that both FFN and MoE are special cases of kernel regression — motivating KERN as a principled alternative to Softmax routing. Experiments across MoE and LLM settings validate its effectiveness.
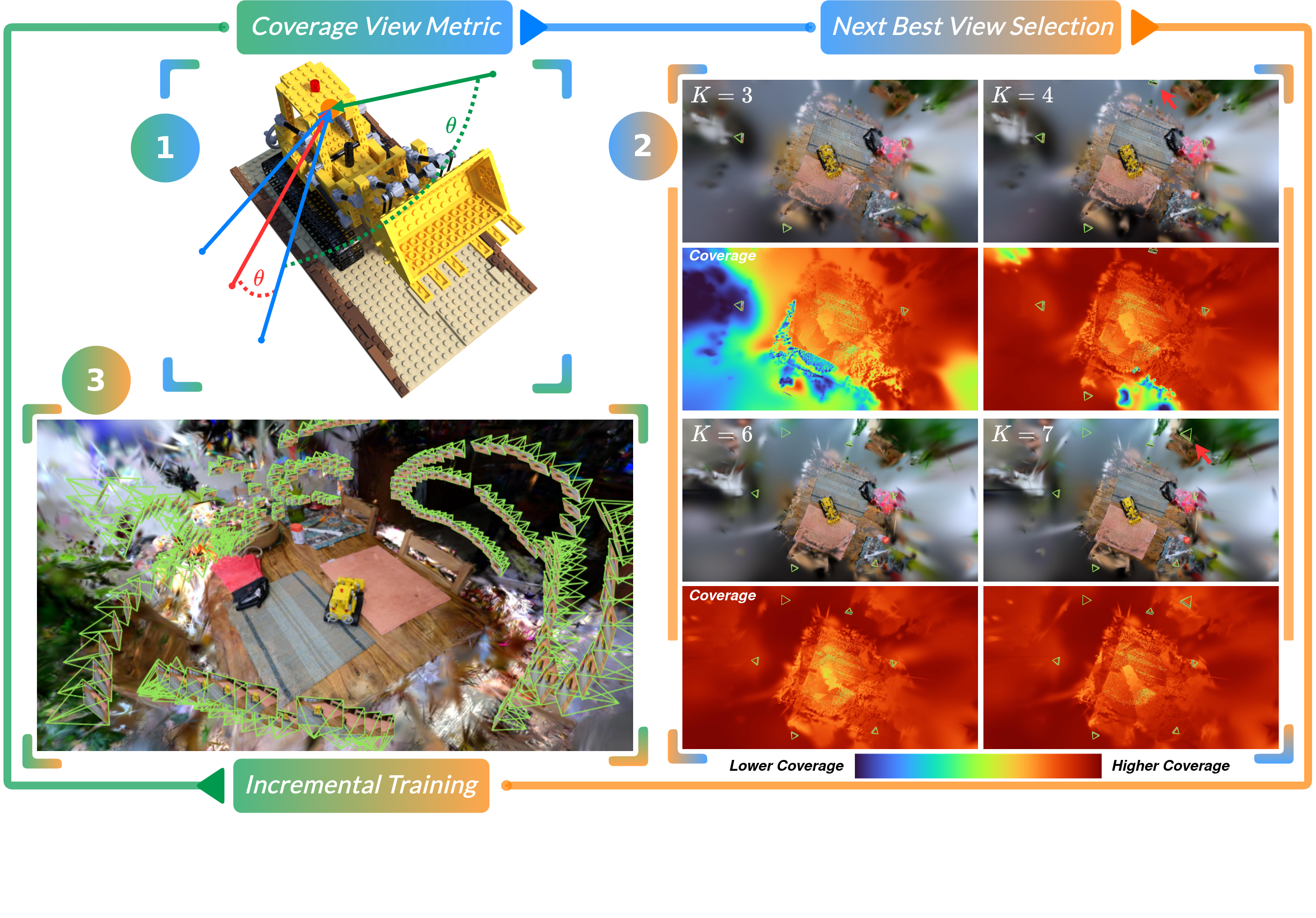
Coverage Optimization for Camera View Selection
Next best view selection can be formulated as a coverage optimization problem, leading to interpretable, reliable, and real-time performance.
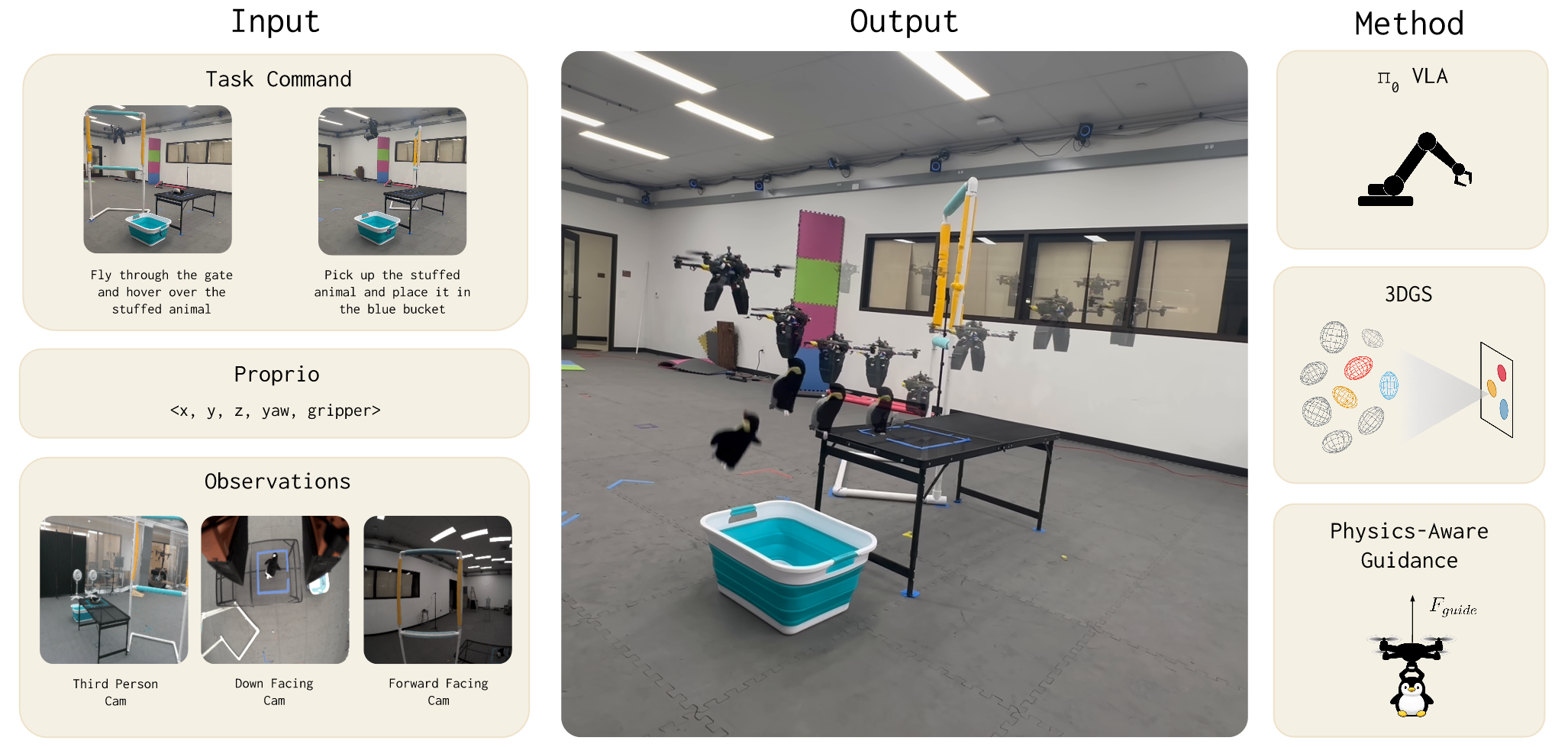
π, But Make It Fly: Physics-Guided Transfer of VLA Models to Aerial Manipulation
A study on how well manipulator pretrained VLAs transfer to aerial manipulators.
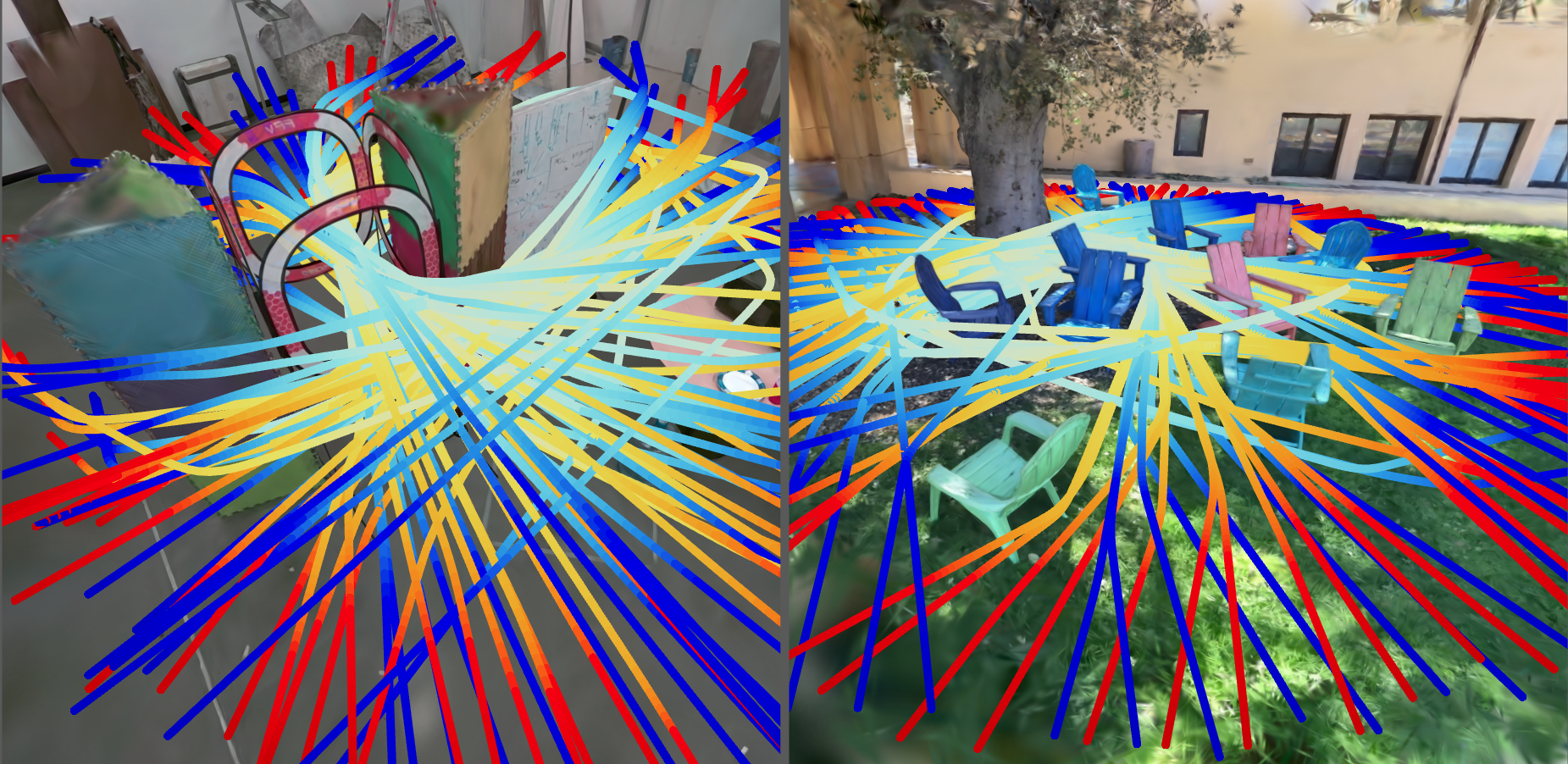
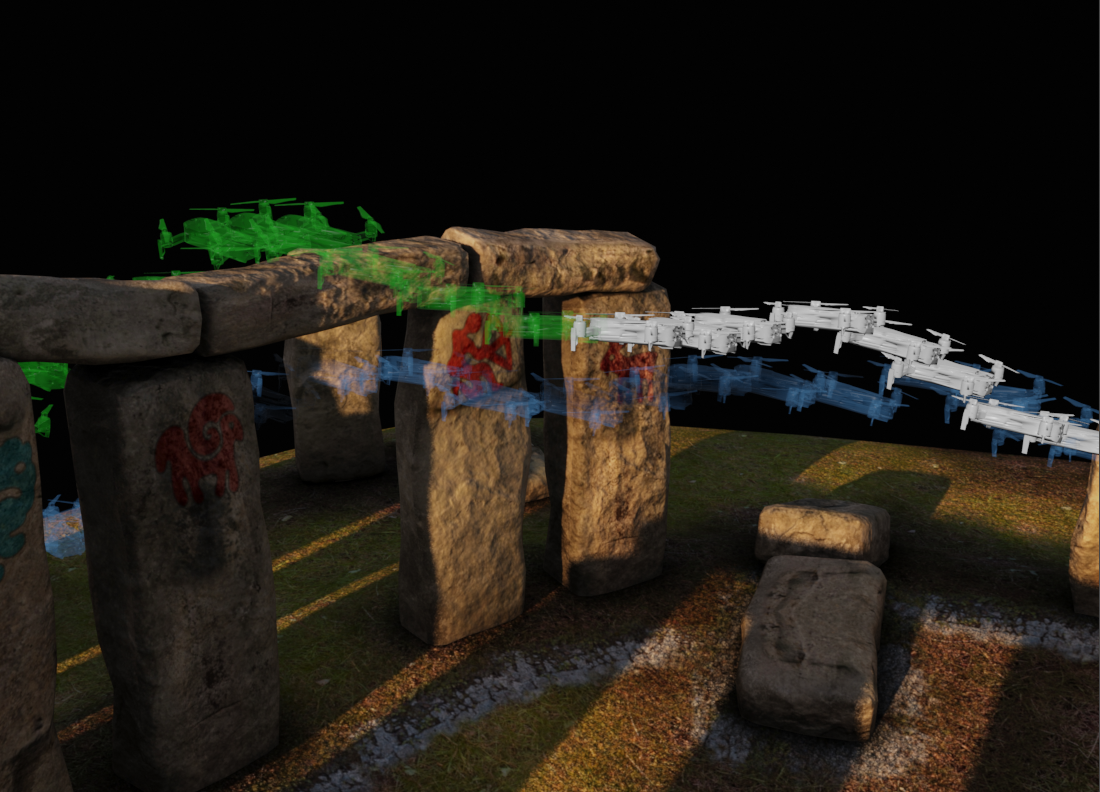
Learning Visual Drone Navigation with Gaussian Radiance Fields and Differentiable Dynamics
GRaD-Nav utilizes 3DGS and differentiable dynamics to train visual drone navigation policy efficiently.
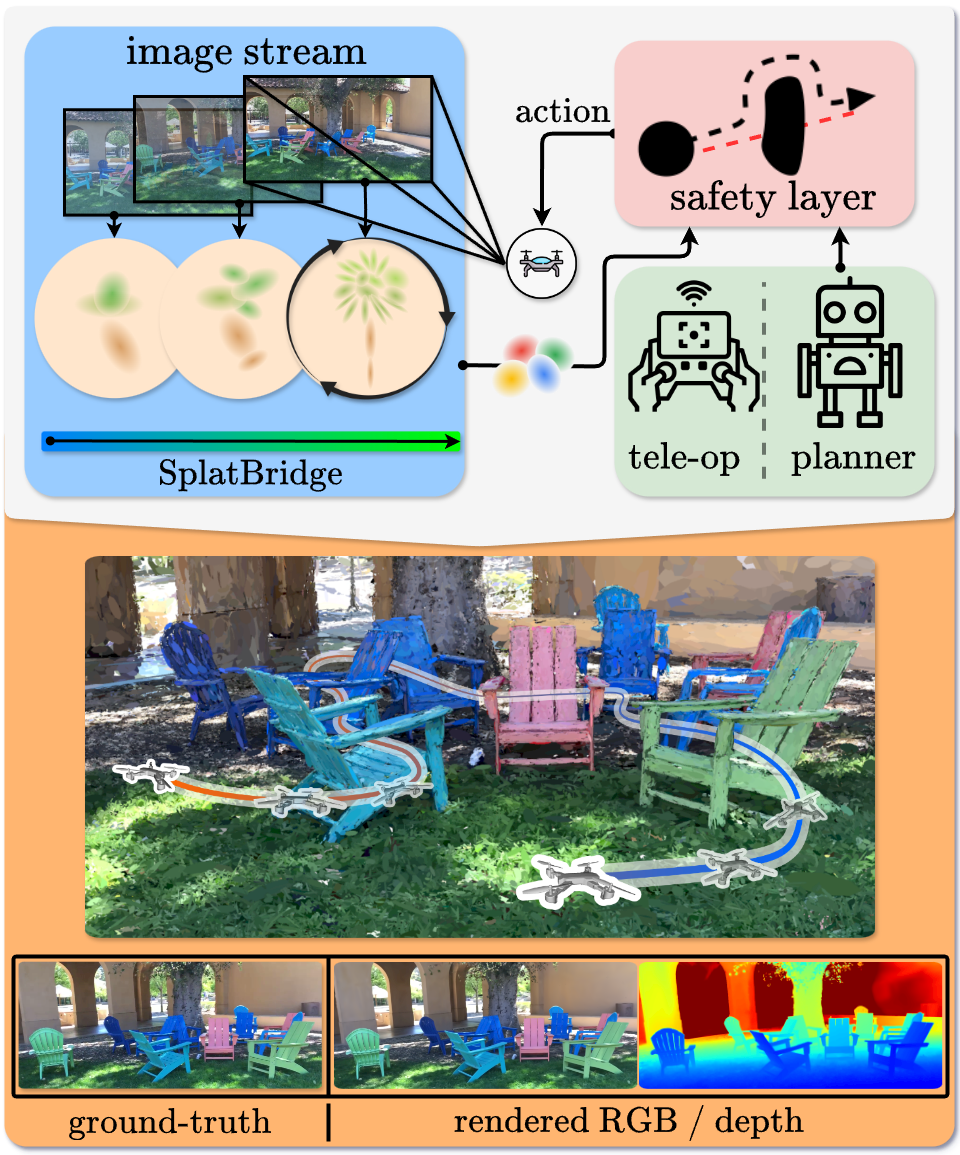
Safe Real-Time Robot Navigation in Gaussian Splatting Maps
Splat-Nav perform efficient and scalable collision avoidance and pose estimation with Gaussian Splatting environments.
A Control Barrier Function for Safe Navigation with Online Gaussian Splatting Maps
SAFER-Splat is a fast and scalable safety filter that operates simultaneously with real-time Gaussian Splatting training, enabling safe robot motions from vision.
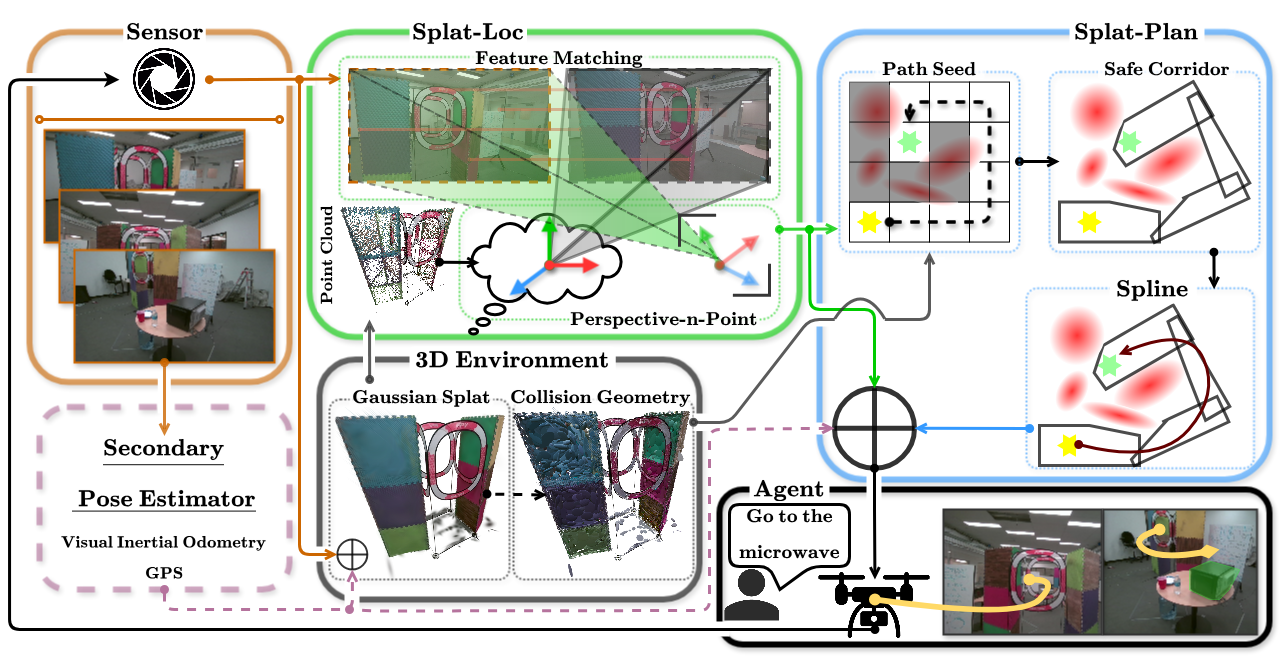
Splat-Nav: Safe Real-Time Robot Navigation in Gaussian Splatting Maps
Splat-Nav is a unified real-time safe planning and pose estimator built on a 3D Gaussian Splatting map.
SAS: Simulated Attention Score
The attention mechanism is a core component of the Transformer architecture. Various methods have been developed to compute attention scores, including multi-head attention (MHA), multi-query attention, group-query attention and so on. We introduce Simulated Attention Score (SAS), which maintains a compact model size while simulating a larger number of attention heads and hidden feature dimension per head. To control the parameter cost, we also propose Parameter-Efficient Attention Aggregation (PEAA).
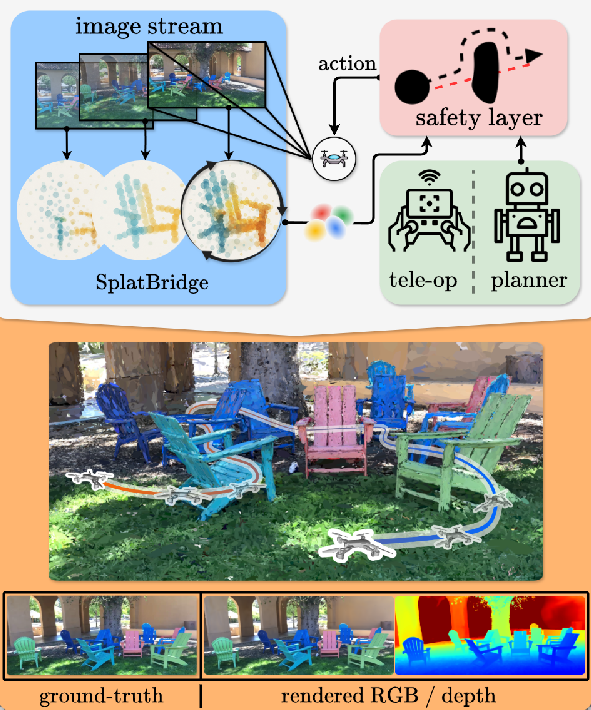
SAFER-Splat: Safety with Control Barrier Functions in Online Gaussian Splatting Maps
An algorithm for real-time, dynamic collision avoidance in your incremental 3D Gaussian Splatting mapping pipeline.
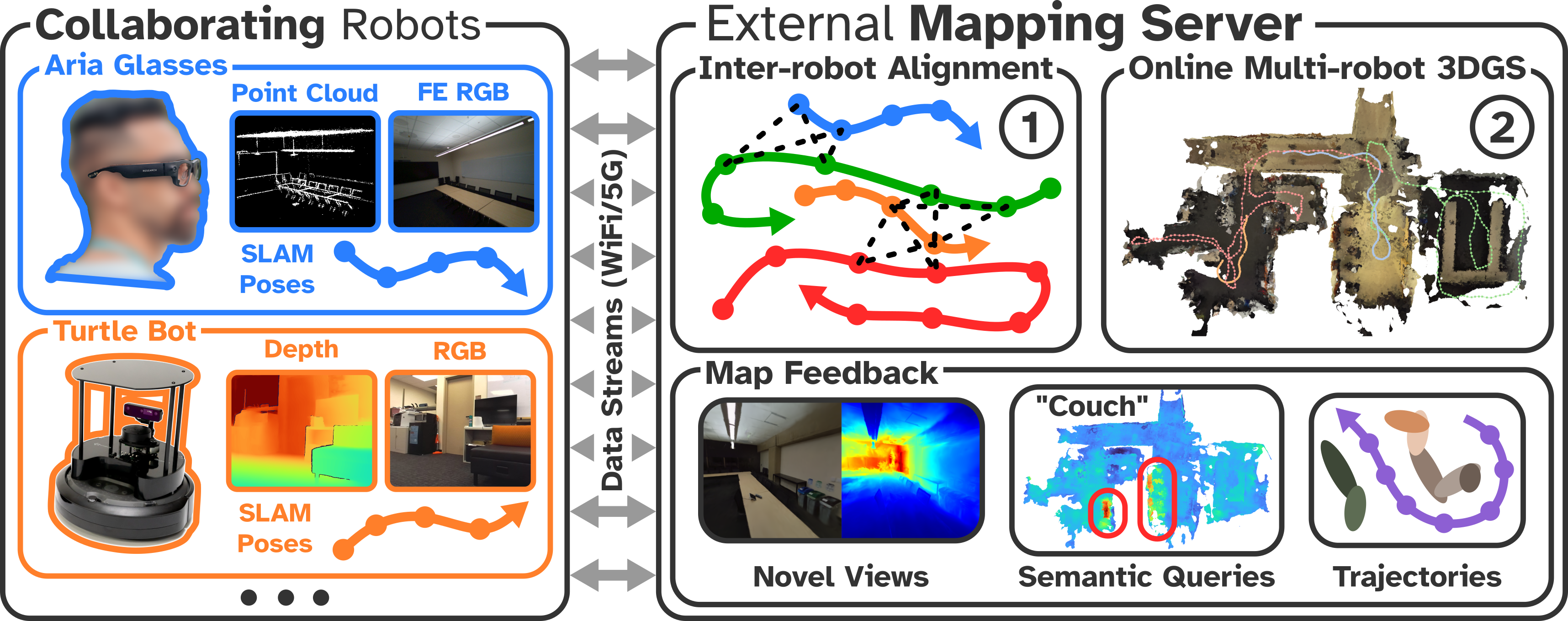
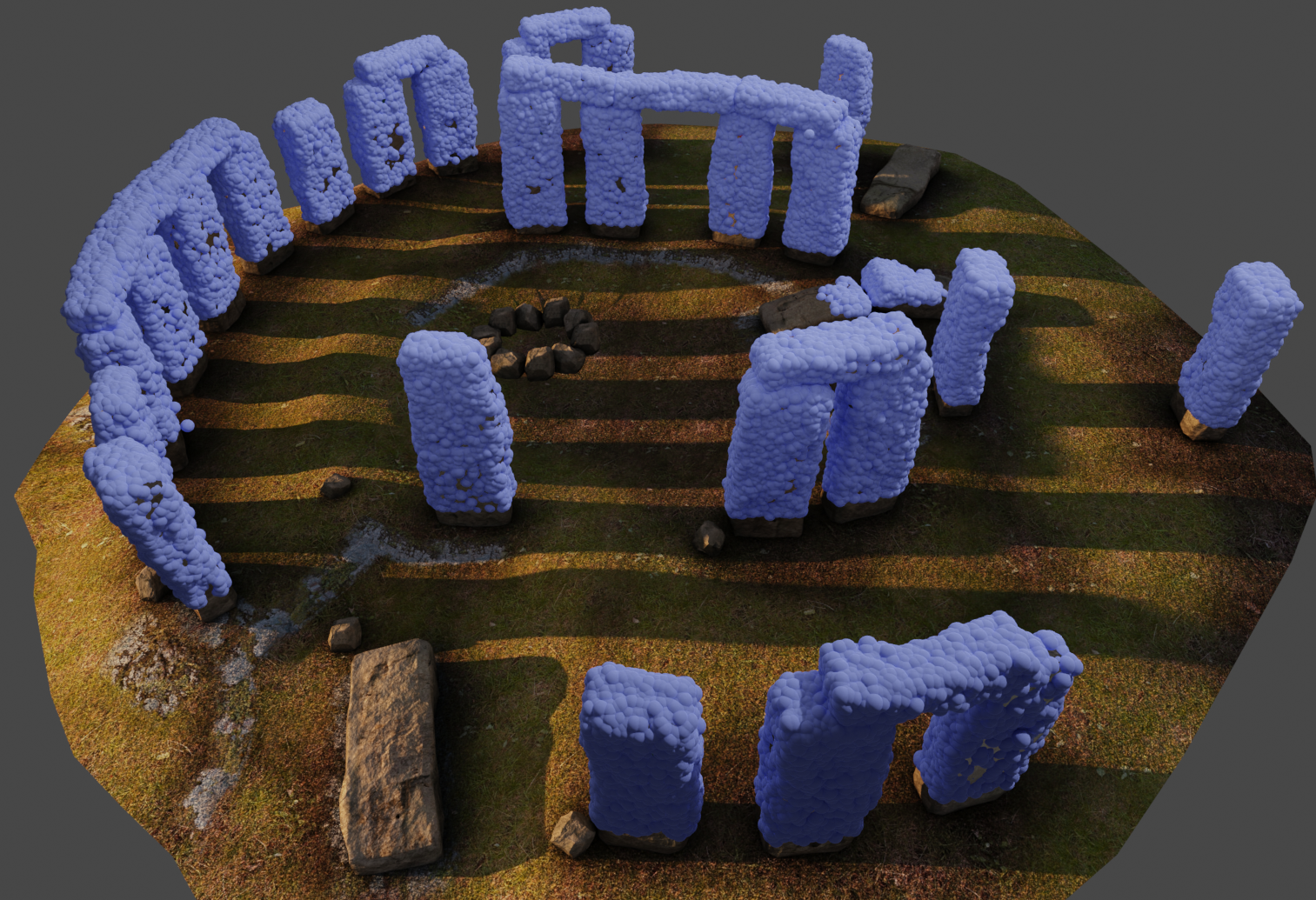
HAMMER: Heterogeneous, Multi-Robot Semantic Gaussian Splatting
HAMMER is a real-time multi-robot 3D Gaussian Splatting mapping pipeline for heterogeneous robot fleets.

GRaD-Nav++: Vision-Language Model Enabled Visual Drone Navigation with Gaussian Radiance Fields and Differentiable Dynamics
A light-weighted onboard drone flight VLA framework that based on Differentiable RL and 3DGS.
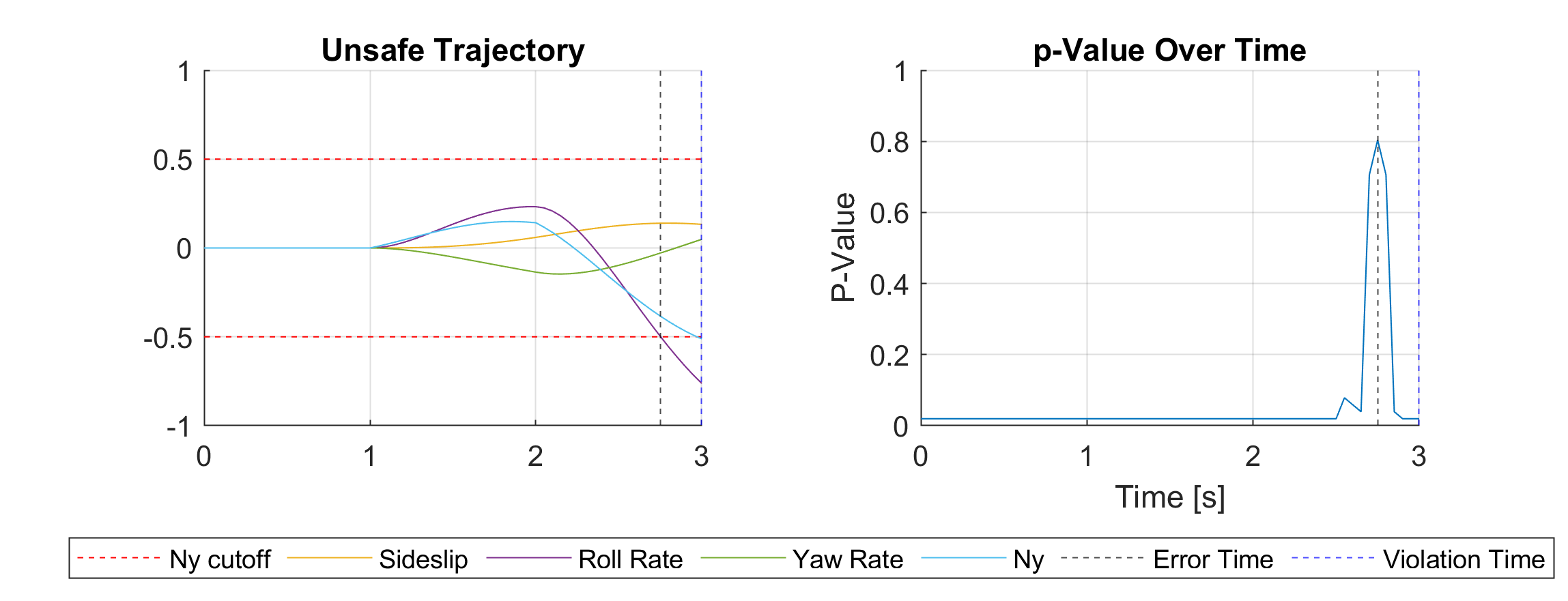
Conformal Safety Monitoring for Flight Testing: A Case Study in Data-Driven Safety Learning
We use stochastic trajectory simulation to learn a calibrated statistical model of the short-term safety risk facing test pilots.
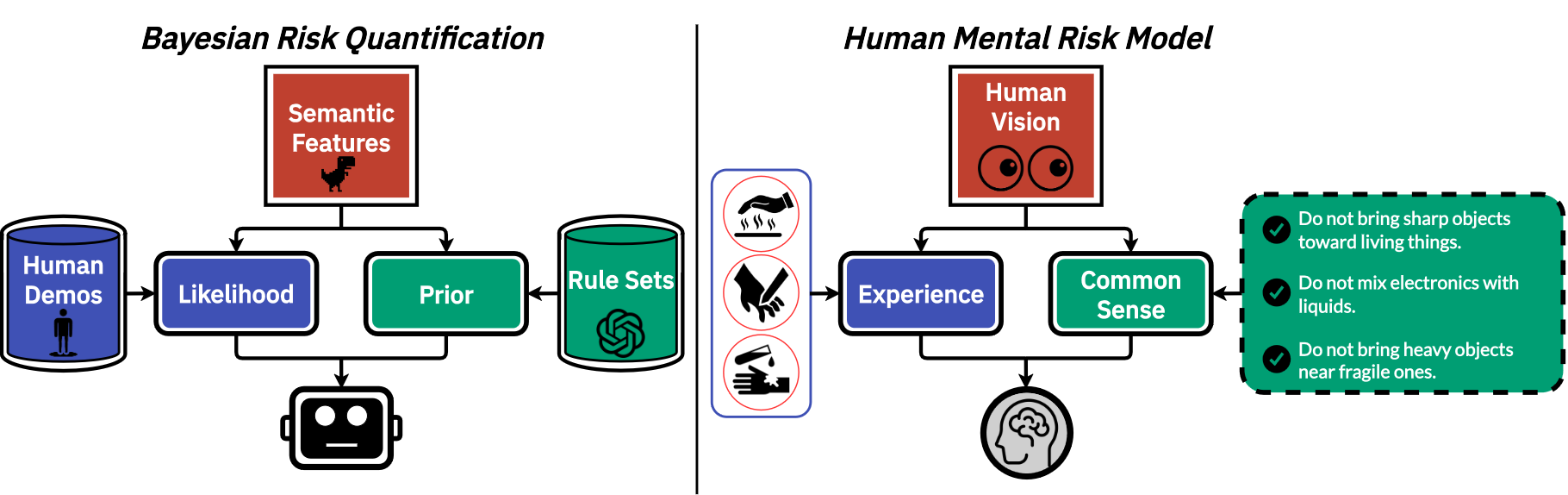
Semantic-Metric Bayesian Risk Fields: Learning Robot Safety from Human Videos with a VLM Prior
We propose a human-aligned Bayesian risk model for quantifying safety in in-the-wild scenarios, beyond settings like collision avoidance.
ARCH: Hierarchical Hybrid Learning for Long-Horizon Contact-Rich Robotic Assembly
We propose ARCH (Adaptive Robotic Compositional Hierarchy) for long-horizon, contact-rich robotic assembly. ARCH combines a low-level primitive library of RL and model-based skills with a high-level imitation learning policy that selects and parameterizes primitives from a handful of demonstrations, enabling generalizable high-precision assembly.

Multi-Stage, Open-Vocabulary Robotic Manipulation via Gaussian Splatting
Editable semantic and affordance aware Gaussian splatting for long horizon manipulation.
Evaluating Generalization of Behavior Cloning Policies
Rigorous and tight confidence sets for evaluating robot performance in hardware.
Collision Avoidance Through Neural Implicit Probabilistic Scenes
CATNIPS rigorously quantifies collision probabilities with NeRFs and performs collision avoidance.
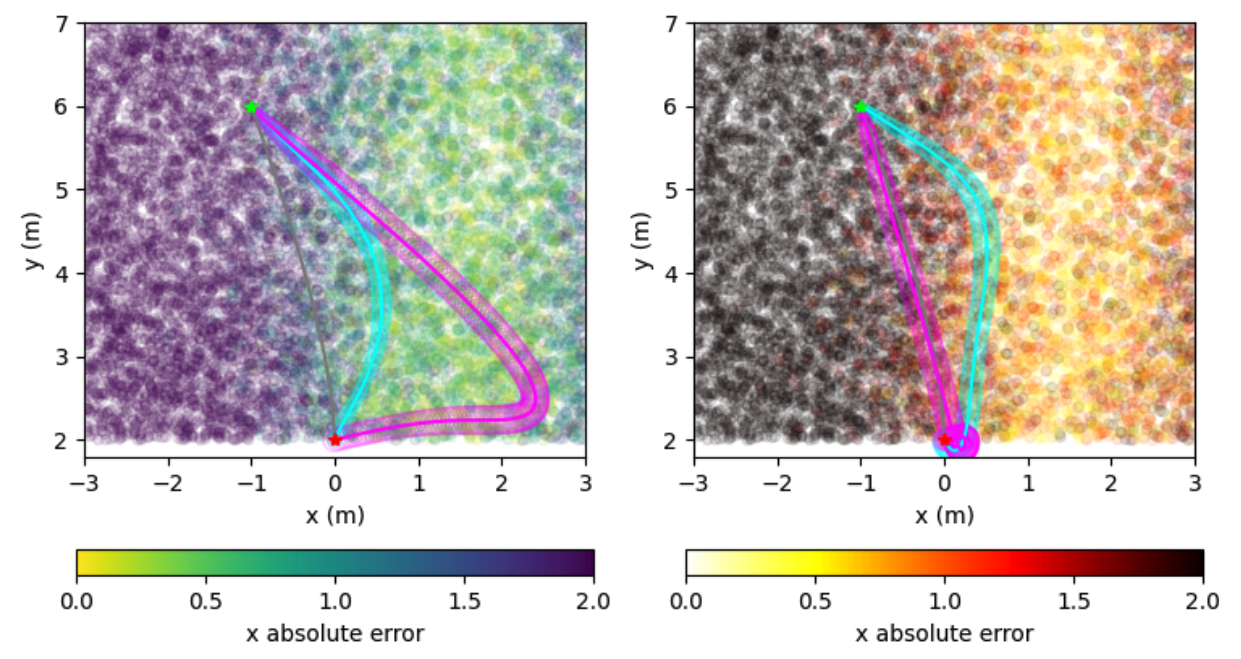
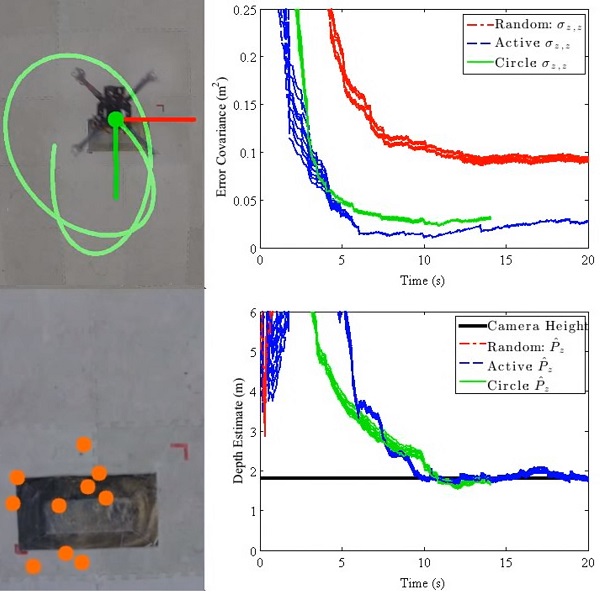
Belief Space Planning under Epistemic Uncertainty for Learned Perception Systems
A method to quantify epistemic perception uncertainty, applied to a belief space planner and Kalman filter.
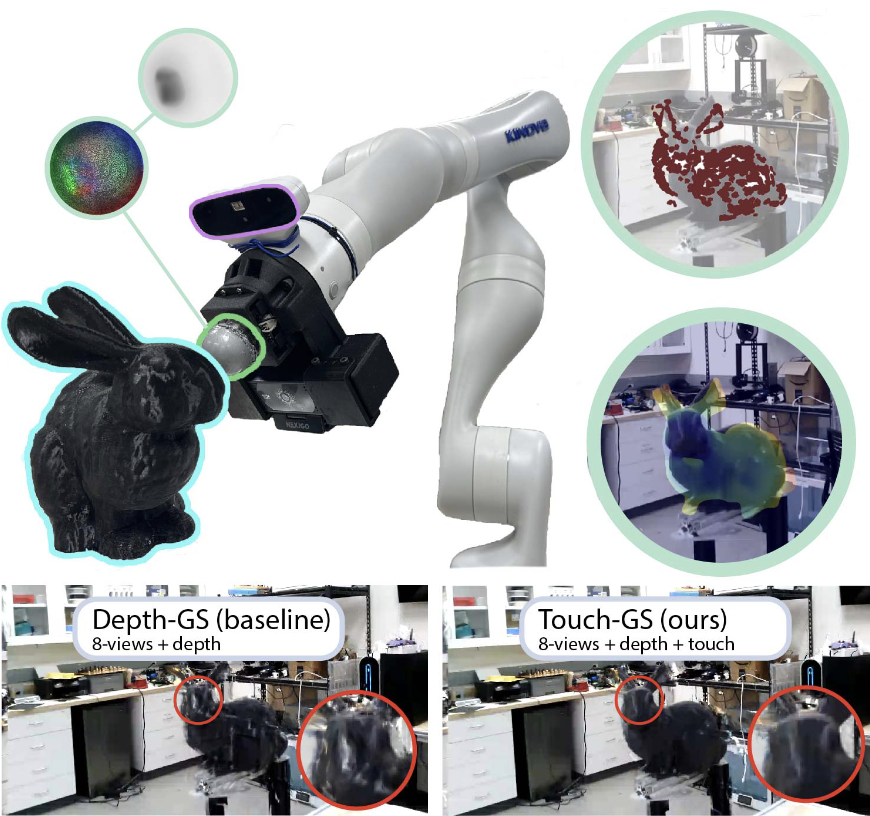
Touch-GS: Visual-Tactile Supervised 3D Gaussian Splatting
Fusion of tactile sensing and visual data using 3D Gaussian Splatting
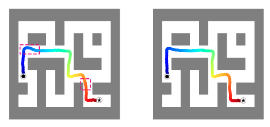
PlanCP - Conformal Prediction for Uncertainty-Aware Planning with Diffusion Dynamics Model
we quantify the uncertainty of diffusion dynamics models using Conformal Prediction (CP).
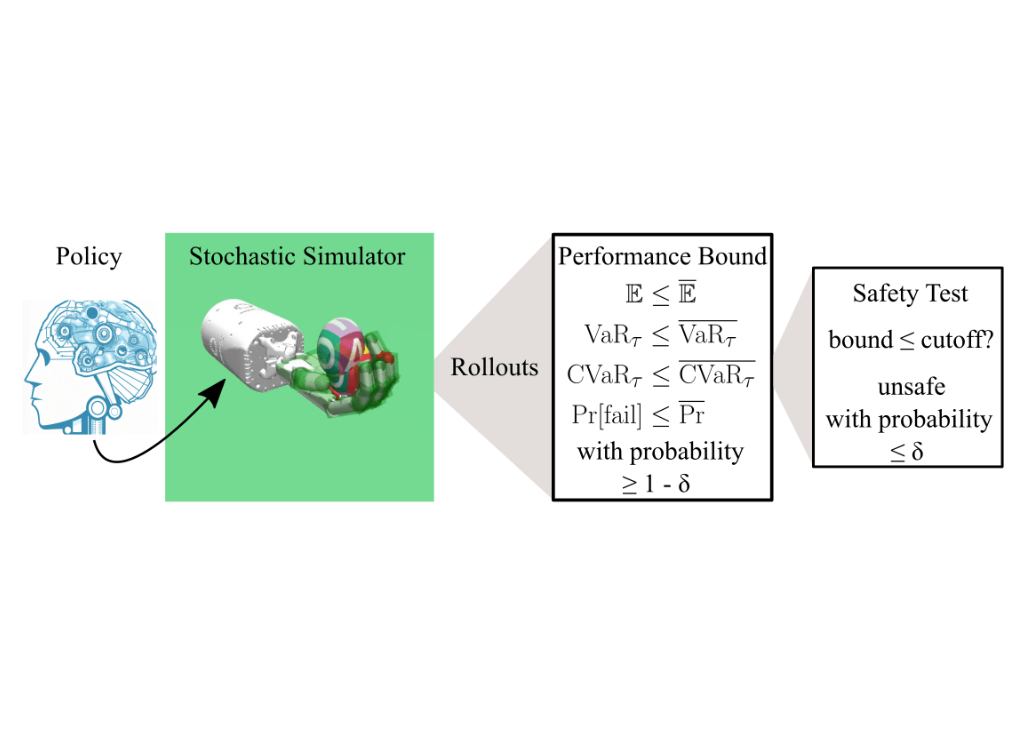
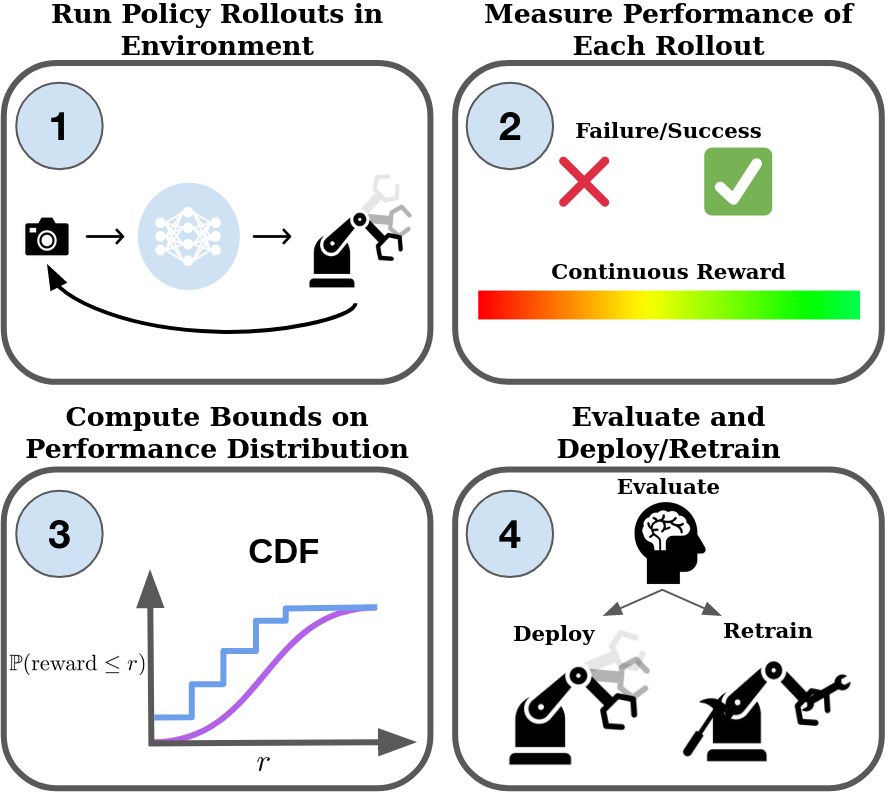
Guarantees on Robot System Performance Using Stochastic Simulation Rollouts
We provide finite-sample, distribution-free, performance guarantees for control policies executed on stochastic robotic systems.
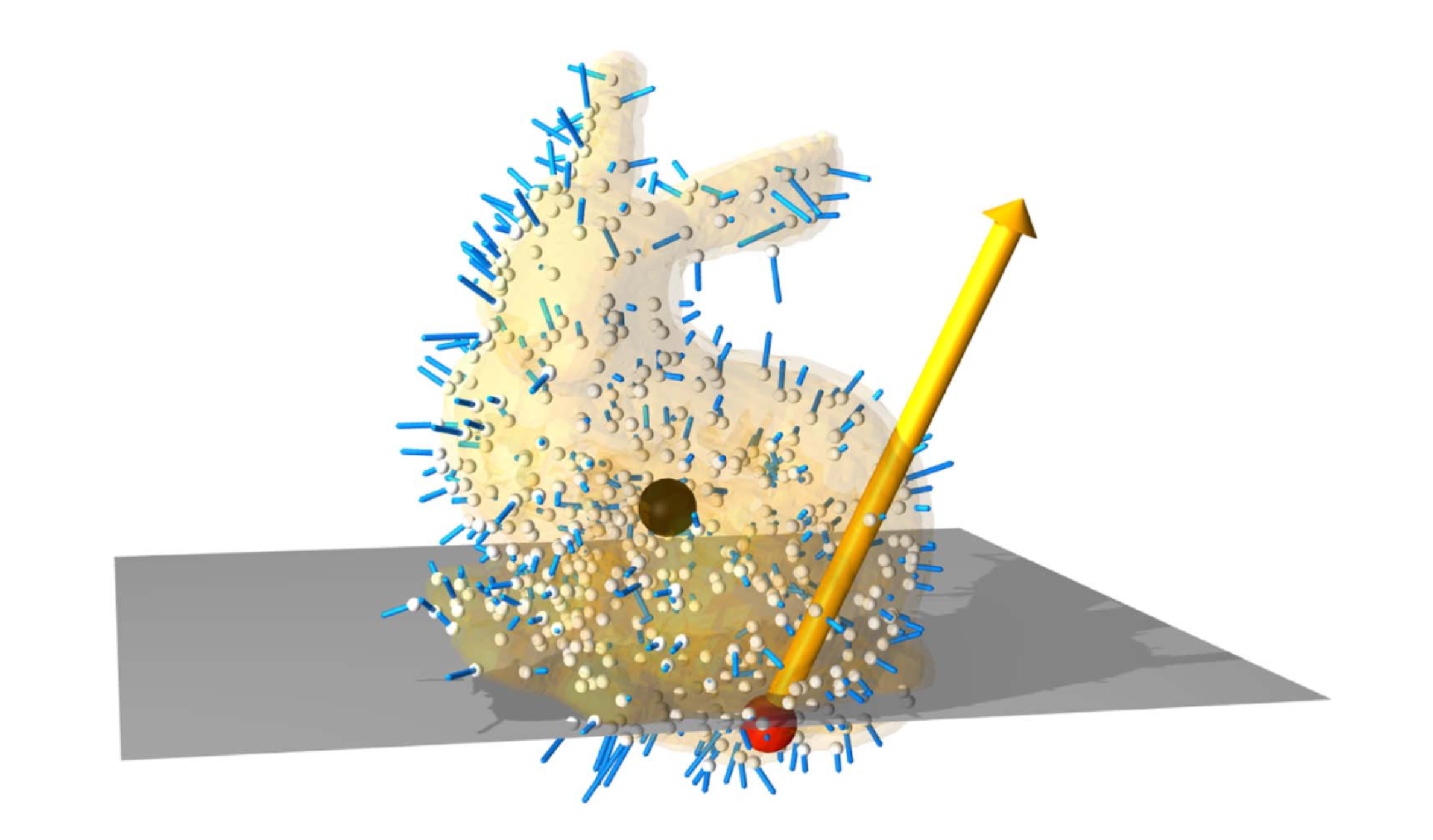
Dynamics Augmented Neural Objects
We present a differentiable pipeline for simulating the motion of objects that represent their geometry as a continuous density field parameterized as a deep network. This includes Neural Radiance Fields (NeRFs), and other related models. From the density field, we estimate the dynamical properties of the object, including its mass, center of mass, and inertia matrix.

Game Theoretic Planning for Autonomous Driving
When interaction and negotiation between vehicles is key, an autonomous driving car should reason about the influence of its decisions over the surrounding cars' trajectories. We propose a fast planner that accounts for the game-theoretic interactions between vehicles.
Neural Network Reachability
We develop a novel method for computing exact forward and backward reachable sets of a neural network with ReLU activation.
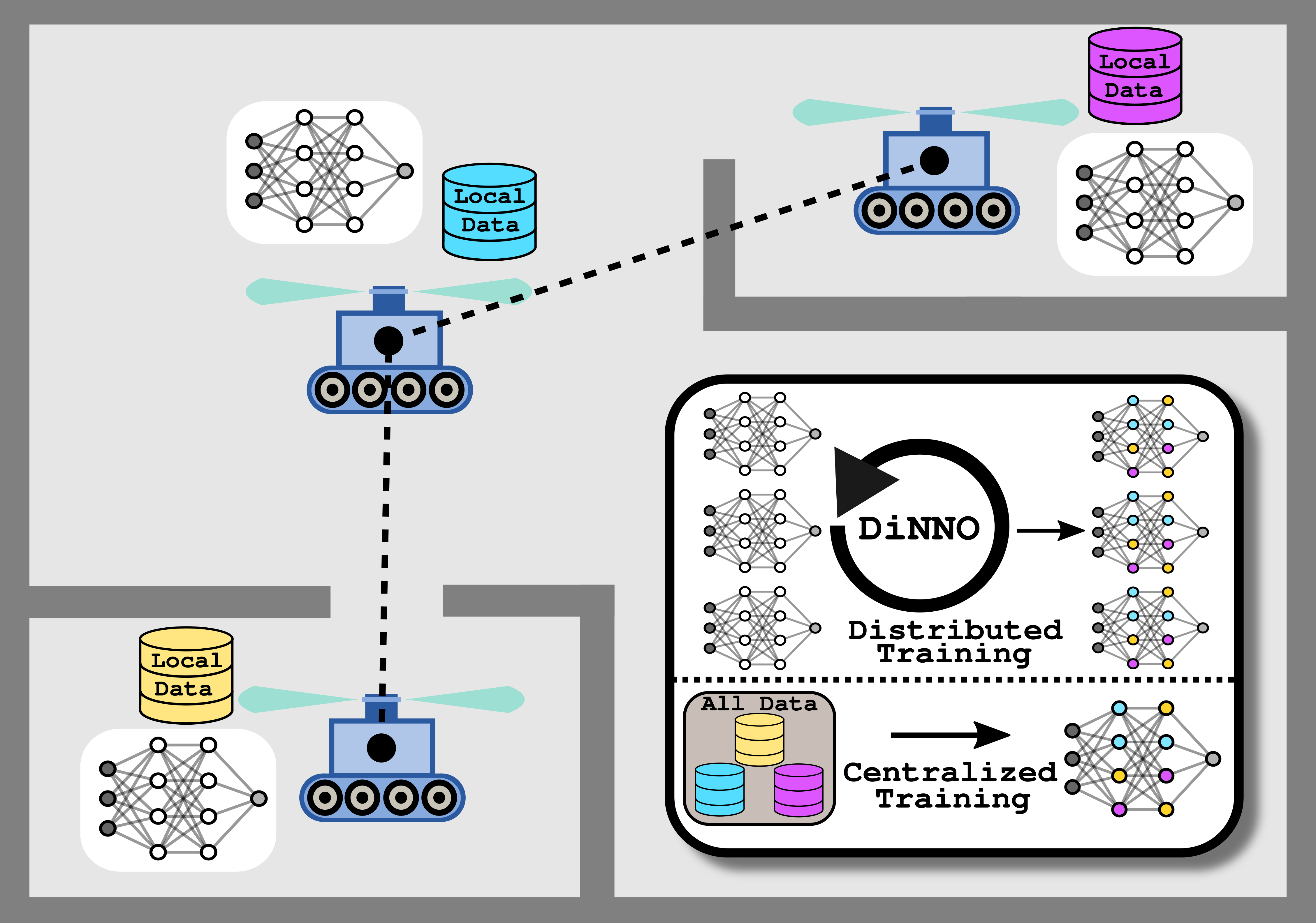
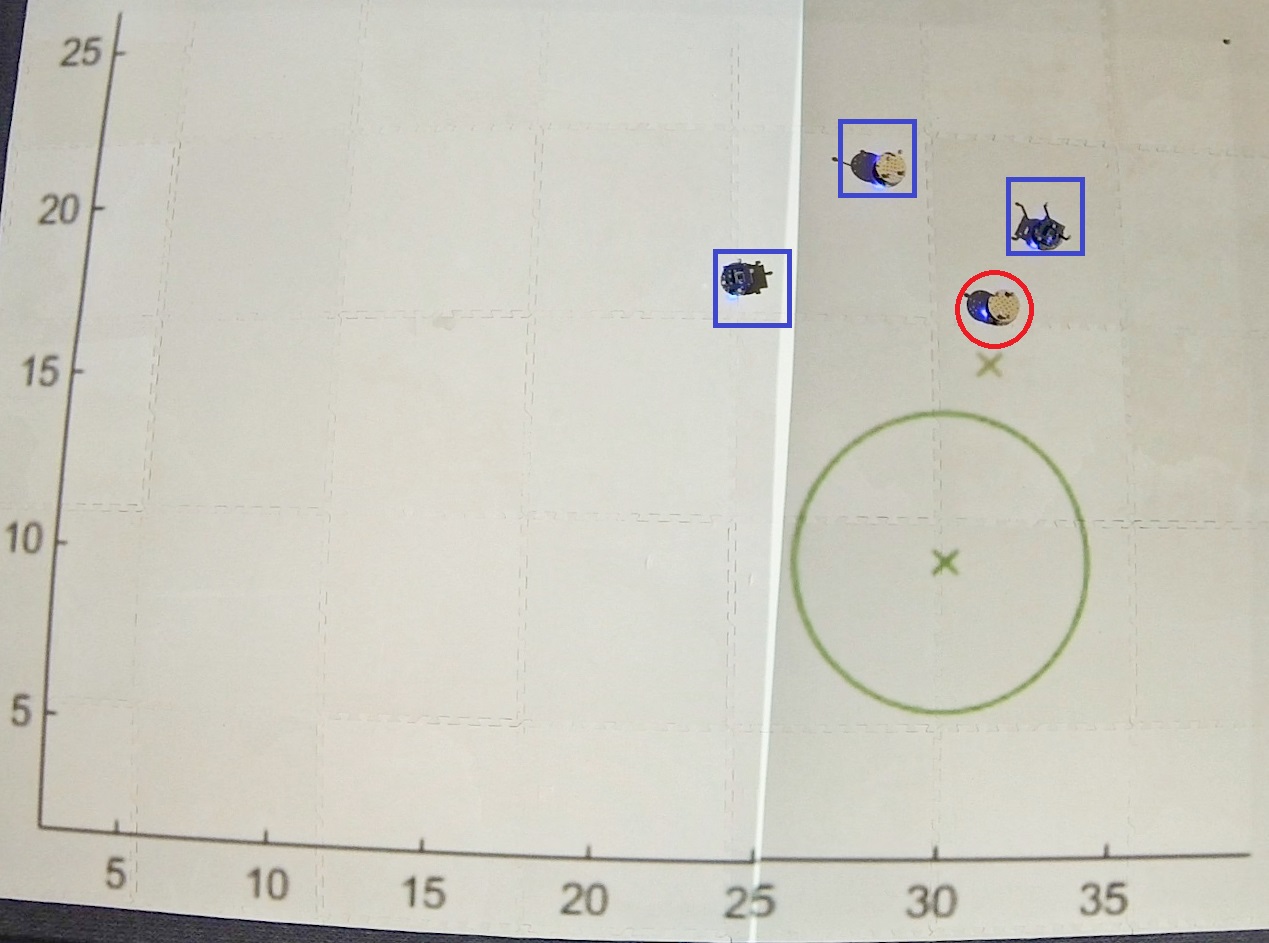
Distributed Multi-Target Tracking for Autonomous Vehicle Fleets
We present a distributed algorithm enabling fleets of autonomous vehicles to track multiple targets within their environments while communicating locally with their neighbors.
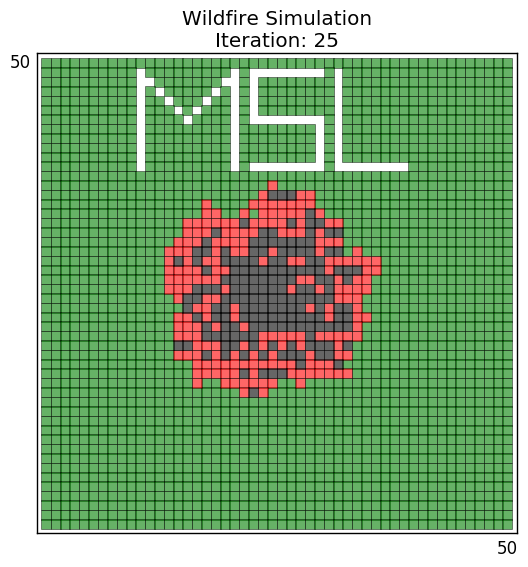
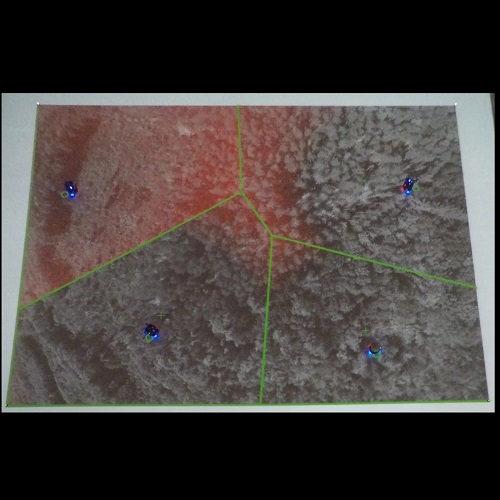
Wildfire Control and Estimation
We study algorithms for modelling, estimating, and controlling wildfires using multi-robot teams.

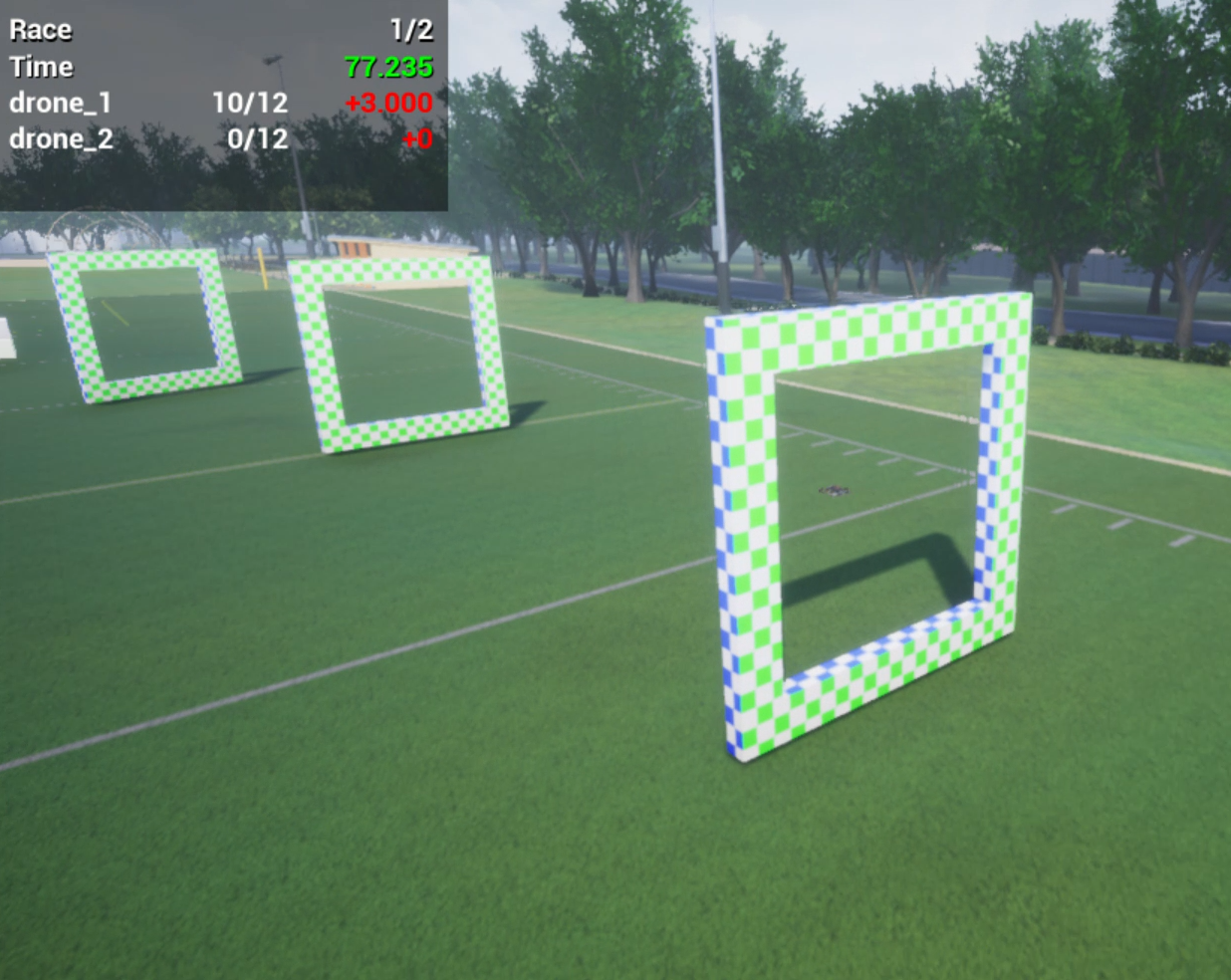
Game Theoretic Planning for Autonomous Drone Racing
How should robots plan to compete? We propose a game theoretic planner which allows drones to reason online about their opponents' actions during race scenarios.
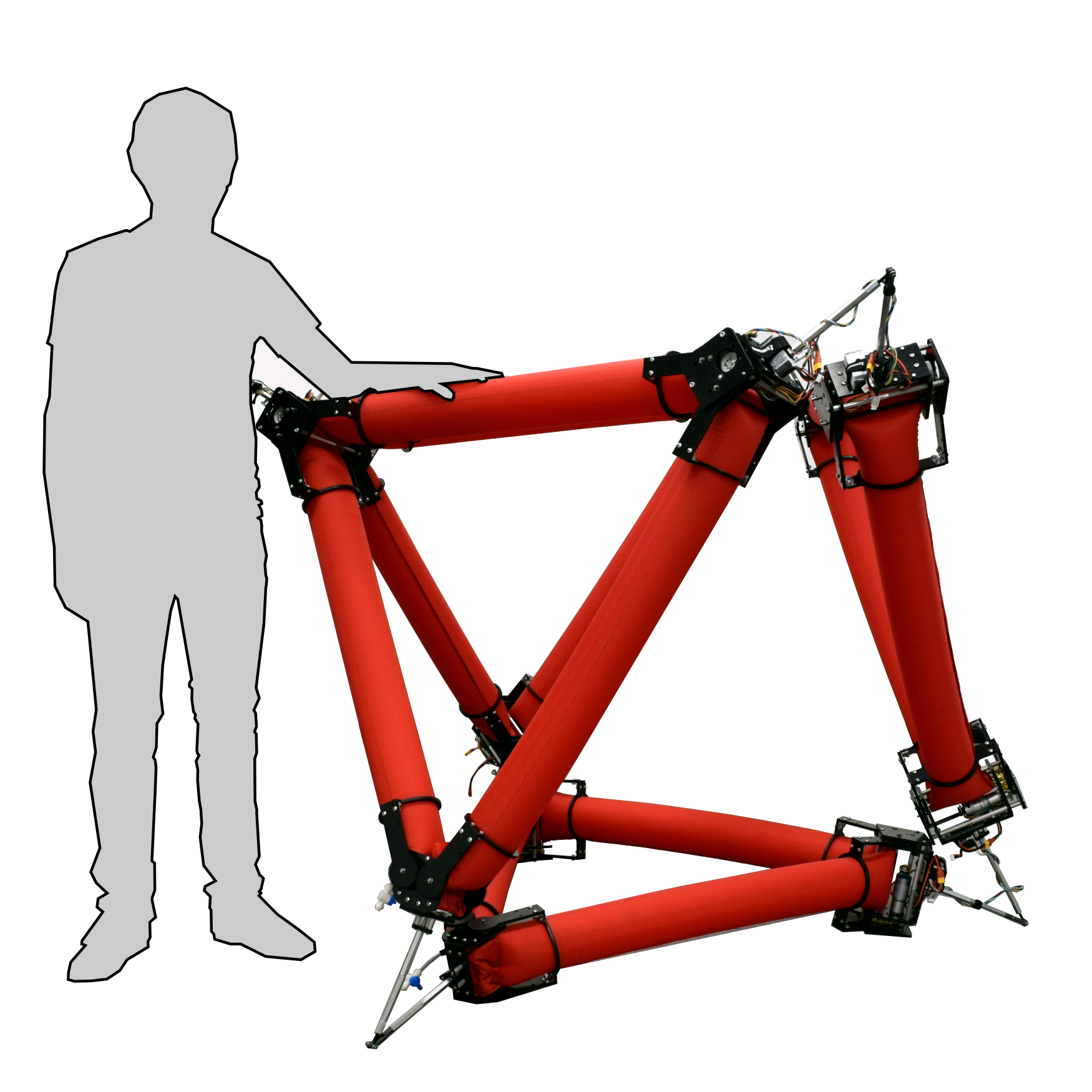
Shape-Changing Truss Robots
We introduce an truss robot that is composed primarily of inflated fabric tubes, and is capable of locomotion and object manipulation.

Planning for Human-Robot Interaction
We combine risk-sensitive optimal control tools with deep generative modeling to enable robotic crowd navigation, and observe diverse interaction behavior by varying the robot's risk sensitivity.

Adaptive Control for Collaborative Manipulation
How can robots work together to move unknown payloads? Using tools from adaptive control, we develop a distributed algorithm for collaborative manipulation without prior payload knowledge.
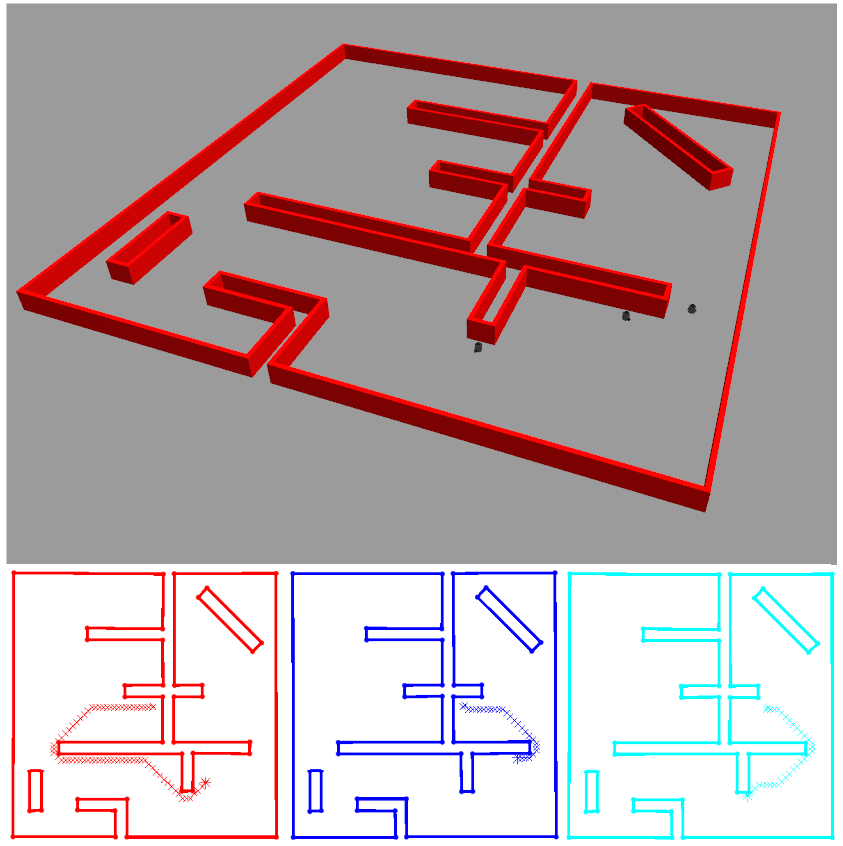
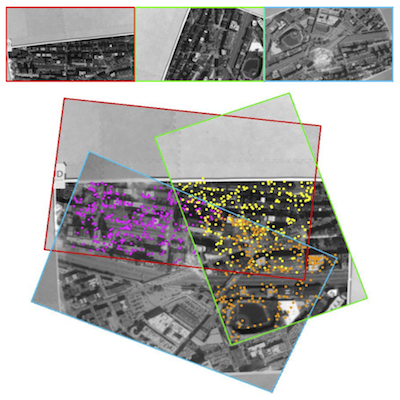
Wireframe Mapping for Resource-Constrained Robots
How can robots build and store maps well-suited to sparse environments? We propose a distributed algorithm for exploring and mapping a sparse environment under resource constraints.
Game of Drones Competition 2019
A competition for users to develop autonomous drone racing perception and control algorithms to compete in a simulation framework.
Active Estimation for Motion-Based Communication
Can robots communicate intent using only motion? This project studies using techniques from active perception to enable multi-robot coordination without explicit communication.
Belief Space Planning for Continuous-Time Dynamical Systems
We propose a novel belief space planning technique for continuous dynamics by viewing the belief system as a hybrid dynamical system with time-driven switching.
Intercepting Rogue Robots - An Algorithm for Capturing Multiple Evaders with Multiple Pursuers
We propose a distributed algorithm for the cooperative pursuit of multiple evaders using multiple pursuers in a bounded, convex environment.
Virtual Rigid Bodies for Coordinated Agile Maneuvering of Teams of Micro Aerial Vehicles
We propose a method for controlling a team of quadrotor micro aerial vehicles to perform agile maneuvers while holding a fixed relative formation, as well as transitioning between a sequence of formations.

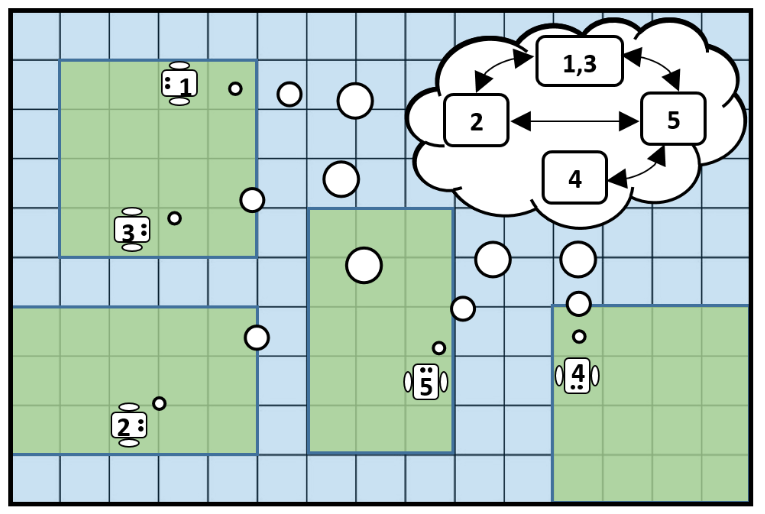
Multi-Robot Manipulation without Communication
We present novel algorithms that allow a large number of small robots to move a comparatively large object to a goal location.
Cooperative Multi-Quadrotor Pursuit of an Evader in an Environment with No-Fly Zones
We investigate the cooperative pursuit of an evader by a group of quadrotors in an environment with no-fly zones.
Virtual Rigid Bodies for Agile Coordination of Quadrotor Swarms and Human-Swarm Teleoperation
We propose a method for controlling a swarm of quadrotor micro aerial vehicles to perform agile interleaved maneuvers while holding a fixed relative formation, and transitioning between different formations.
Vision-Based Distributed Formation Control without an External Positioning System
We presented a fully distributed solution to drive a team of robots to reach a desired formation in the absence of an external positioning system that localizes them.
Bio-Inspired Non-Cooperative Multi-Robot Herding
We propose a new approach for a group of robots carrying out a collaborative task to adapt online to performance variations among the robots.
Adaptive Trust in Multi-Robot Coverage Control
We design multi-agent control algorithms that are robust to failures and performance degradation of individual agents, as well as algorithms that are invulnerable to the actions of adversarial agents and hazardous environments.