Bio-Inspired Non-Cooperative Multi-Robot Herding
This work aims to design multi-agent control algorithms that are robust to failures and performance degradation of individual agents. We propose a new approach for a group of robots carrying out a collaborative task to adapt online to performance variations among the robots. Variations can occur in both sensing and actuation. We consider the problem of multi-robot coverage, where a group of robots has to spread out over an environment to cover the environment with their sensors. The robots have some performance variations, and do not know beforehand the relative strengths of their performance compared to the others in the team. We present an algorithm that learns the relative performance variations online in a distributed fashion, and automatically compensates by giving the weak robots a smaller portion of the environment, and the stronger robots a larger portion. Using a Lyapunov-type proof, we show the robots converge to locally optimal positions for coverage. We demonstrate our algorithm in both Matlab simulations and experiments with Pololu m3pi mobile robots.
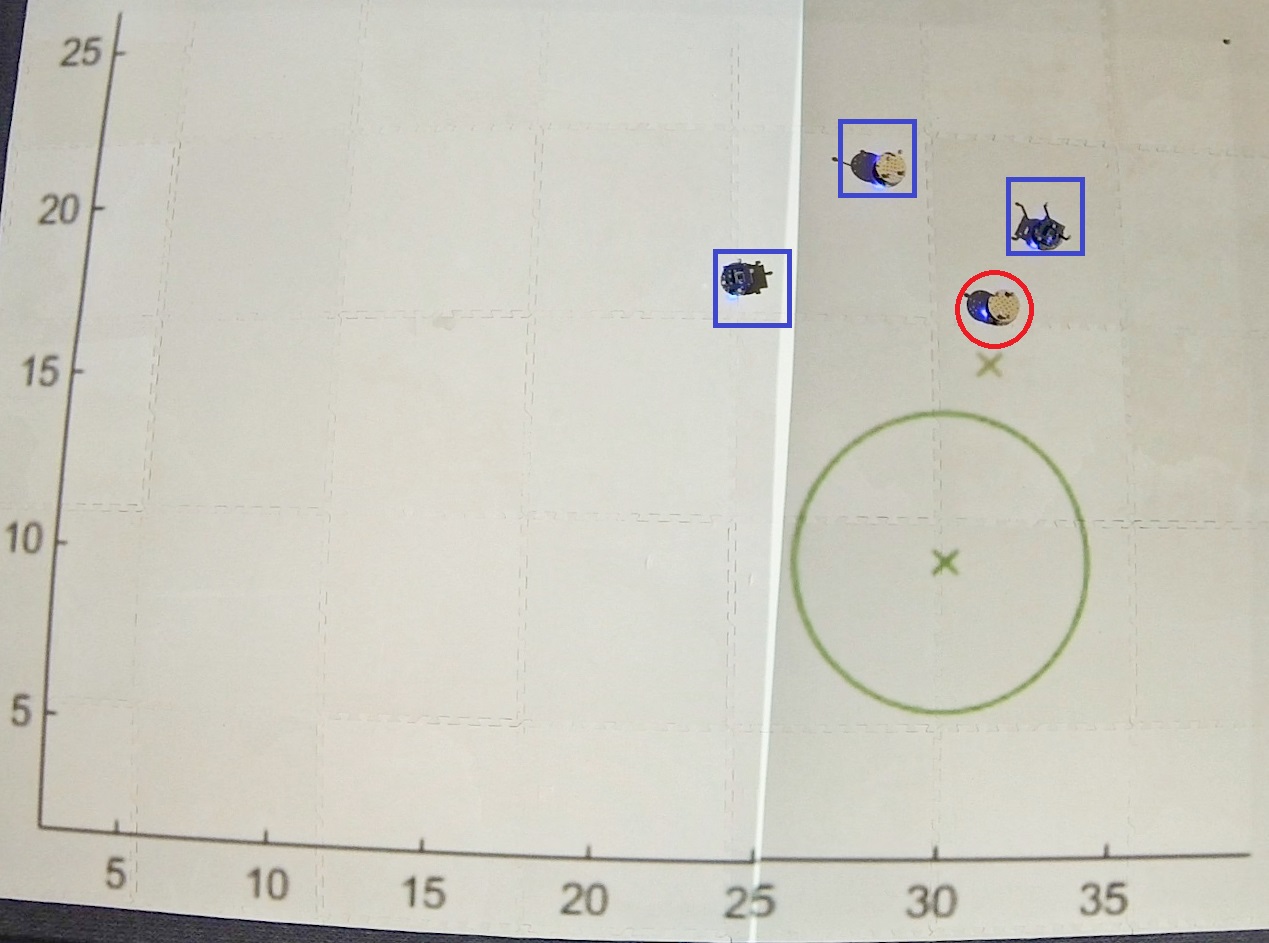
The video below is a part of our 2015 ICRA paper on actuation-based performance variations.