Active Estimation for Motion-Based Communication
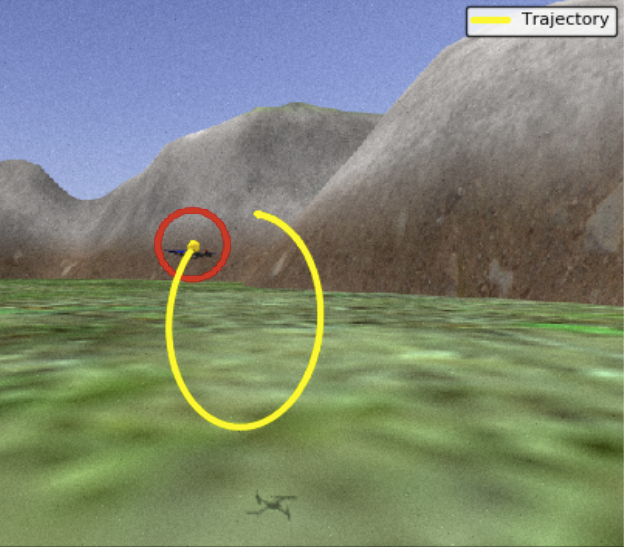
In this project, we consider motion as a means of sending messages between robots. We focus on a scenario in which a message is encoded in a sending robot’s trajectory, and decoded by a receiver robot equipped with a monocular camera. The relative pose between the robots is unknown. We introduce an online Bayesian estimation algorithm based on the Multi-hypothesis Extended Kalman Filter for the receiving robot to simultaneously estimate its relative pose to the sender, and the trajectory class of the sender. The difficulty in this problem arises from the monocular vision model of the receiver and the unknown relative pose between robots, which brings inherent ambiguity into the trajectory identification, and hence the message decoding. An active vision-based control policy is derived and combined with the Bayesian estimation in order to deal with this difficulty. The policy is constructed online based on Monte Carlo Tree Search and aims at reducing the entropy over the trajectory class distribution. The algorithm has broad applications, e.g., to intent modeling and motion prediction for autonomous driving and autonomous drone operations. Simulation results demonstrate that the proposed estimation algorithm and the control policy result in an accurate trajectory classification.