Virtual Rigid Bodies for Coordinated Agile Maneuvering of Teams of Micro Aerial Vehicles
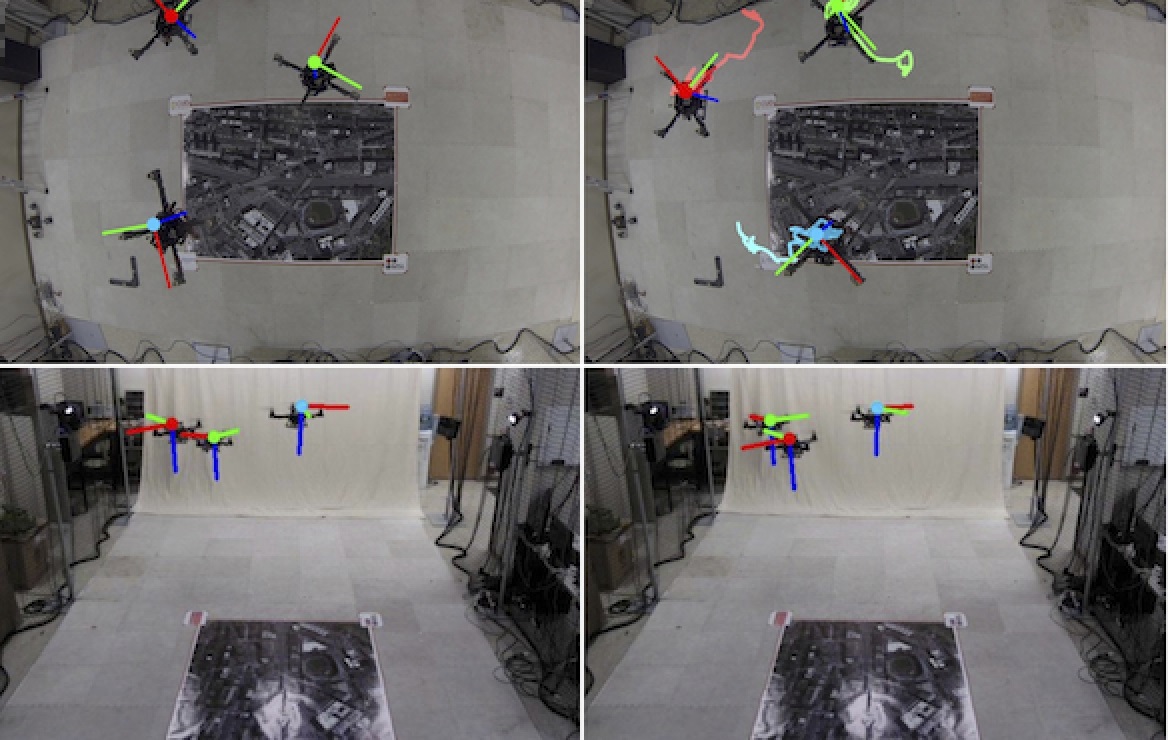
This paper proposes a method for controlling a team of quadrotor micro aerial vehicles to perform agile maneuvers while holding a fixed relative formation, as well as transitioning between a sequence of formations. The objective is to coordinate the quadrotors to fly in intricate interlaced patterns, similarly to an air show demonstration team. The paper proposes a new abstraction, called a Virtual Rigid Body, which allows the quadrotors to hold relative positions while executing agile maneuvers as a group. By planning trajectories for the Virtual Rigid Body in SE(3), trajectories for each quadrotor are obtained in order to maintain the desired formation during the maneuver. The paper also proposes a method for sequencing a series of Virtual Rigid Body formations; automatically designing collision free transitions between successive formations, while the team simultaneously executes a trajectory in SE(3). The resulting sequence of formations and transitions gives trajectories that weave intricate designs while avoiding collisions. The method is demonstrated experimentally with 3 KMel K500 quadrotors flying in a motion capture environment.