Shape-Changing Truss Robots
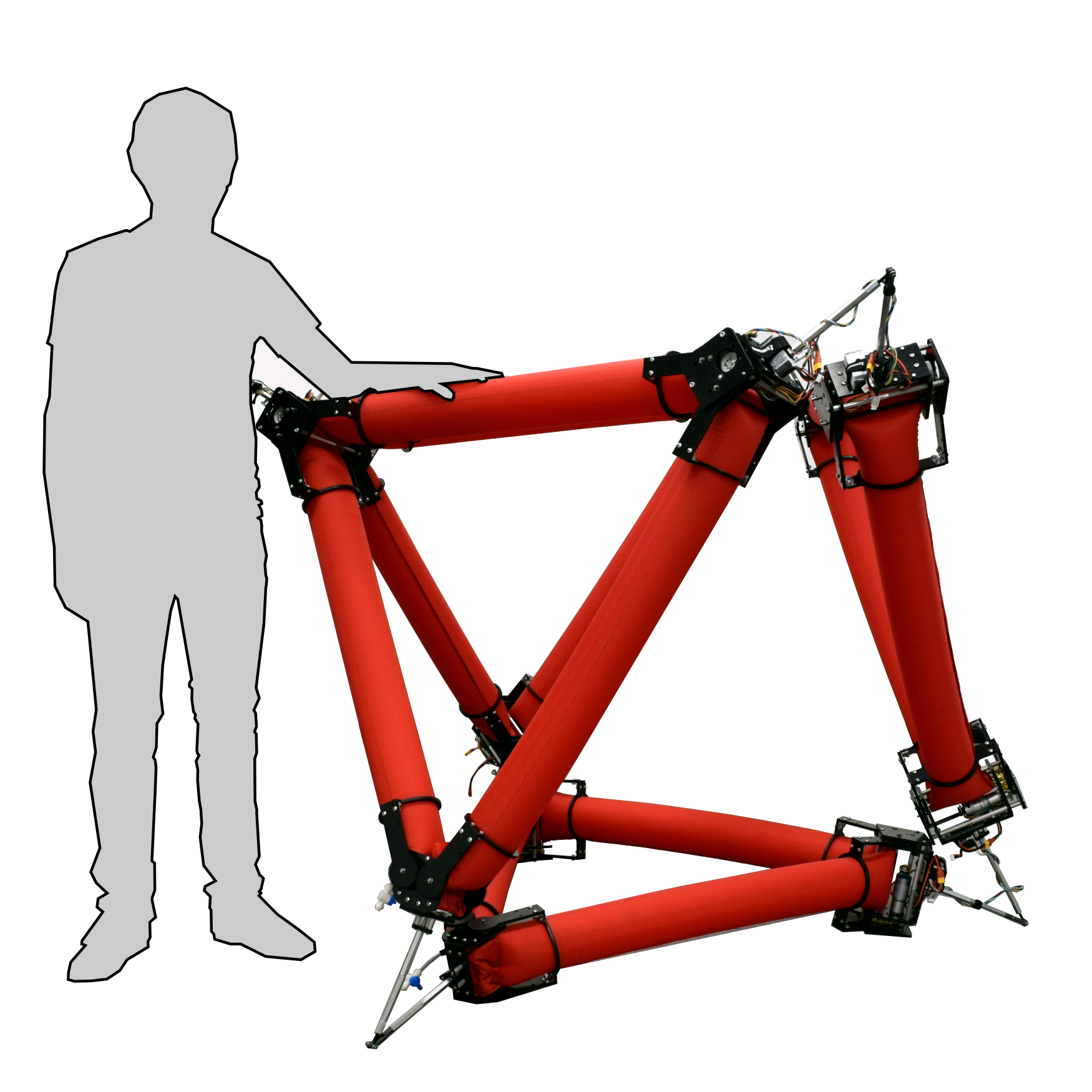
We are developing a class of robotic trusses that are capable of activley changing their shape. In [1] we introduce an truss robot that is composed primarily of inflated fabric tubes, and is capable of locomotion and object manipulation. s We have also developed control algorithms for truss robots. In [2] we derive the differential kinematics of such robots, and formalize concepts of controllability based on graph rigidity. Control methods are then developed for two separate applications: locomotion and shape morphing. The control algorithm in both cases solves a series of linearly constrained quadratic programs at each time step to minimize an objective function while ensuring physical feasibility. We present simulation results for both locomotion along a prescribed path, and morphing to a target shape.